

目前使用AWR2243芯片级联方案,使用TDM模式发波(8发)探测公路上车辆目标。为了满足探测速度要求,使用了MaxVelocity Extend进行速度扩展。
在使用过程中出现了运行效果不稳定的问题,通常能够正常检测目标,运行几十分钟或几个小时之后检测效果变差,表现为速度扩展出错,测量的速度和角度发生错误。 在使用mmWaveLink中的复位重启模块重启射频前端模块之后恢复正常。
这种现象持续了两周,每天会发生2~5次。是否是芯片使用不正确导致,或者该做什么来定位这个问题?
另外在发生错误前后使用监控告警模块监控了当时的接受增益、发射功率等,发现重启前后这些射频指标项差异较大,如下图所示。这个现象说明了什么?
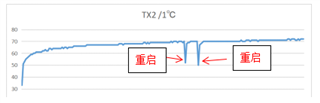
温度在重启前后无变化
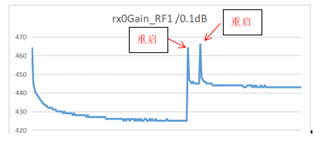
接受增益重启后变高
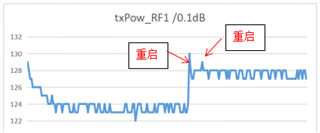
发射增益重启后变高
