Part Number: IWR6843ISK-ODS
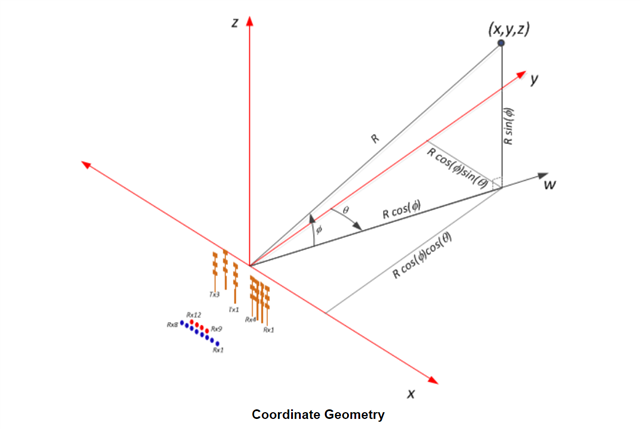
下图1所示,是Visualizer中parseTLV.py中用于将球坐标系转成笛卡尔坐标系的代码,这个函数代码是由该文件中的parseCompressedSphericalPointCloudTLV函数所调用的,如图2,在函数调用时,pointCloud[:, 0:3]以Range, Azimuth, Elevation的顺序进行存储,相应的,在图1函数中的参数也是以这种顺序存储的,根据图3所示的球坐标系,图3中的θ应当是代码中的Elevation,φ应当是Azimuth,r应当是range,而根据图4所示的球坐标与笛卡尔坐标系之间的转换方法来看,图1中对于xyz的计算方法似乎是错误的,以x为例,x应当等于range*sin(elevation)*cos(azimuth),可是图1的运算为range*sin(azimuth)*cos(elevation),请问这中间是存在什么差错吗?
图1

图2

图3

图4