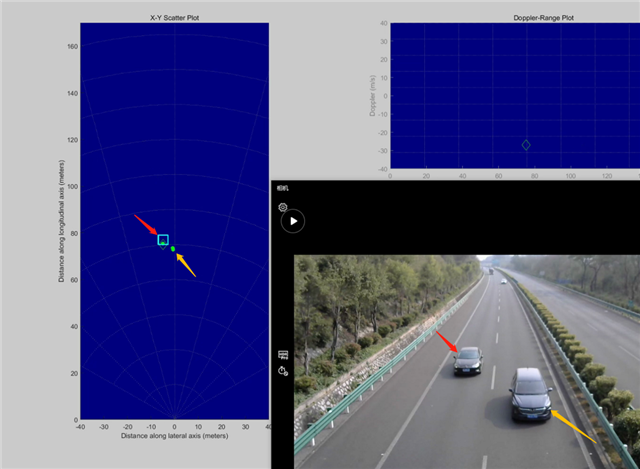
我们采用TI官方IWR1843开发板测试了medium_range_radar的demo和Traffic_Monitoring的demo,通过可视化工具观察medium_range_radar有点云数据、聚类目标输出,但是没有给目标分配ID及跟踪管理;而Traffic_Monitoring有给目标分配ID及跟踪管理。请问是否可以将Traffic_Monitoring的分配目标ID及跟踪管理功能移植到medium_range_radar上实现类似的功能?是否有其它更好地实现给目标分配ID及跟踪管理功能的方法?
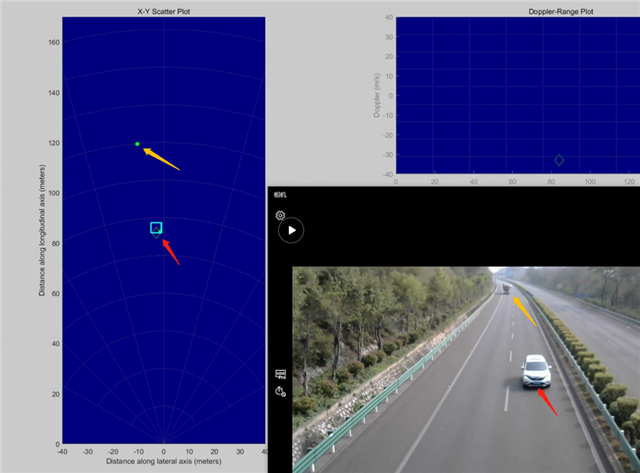
我们测试medium_range_radar的demo时,发现车辆目标很多的时候,可视化工具并没有显示同等数量的目标,是检测漏掉了目标还是有相关代码做了限制?可以把目标数量增加吗?
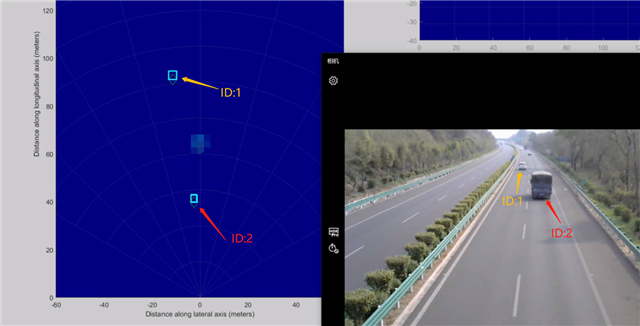
我们测试Traffic_Monitoring的demo时,发现如果车辆目标多的时候,可视化工具会卡死,请问这是什么原因导致的?