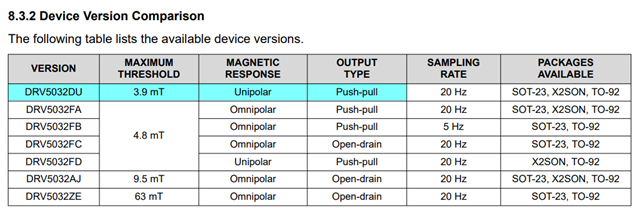
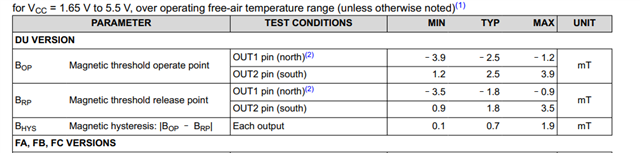
我使用的型号为DRV5032DUDMRT;
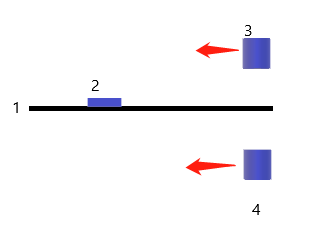
芯片的正反面各一个磁铁,两个磁铁对应两个滑动开关,磁铁的N和S对应。采用结构带动磁铁滑动的方式来触发开关,OUT1和OUT2使用与非门链接,两个磁铁分别滑动和一起滑动均可触发开关输出信号。
磁铁为圆柱形。
如图:1:黑色线代表PCB板。2代表DRV5032DUDMRT;。3和4代表圆柱形磁铁。
磁铁延箭头方向滑动触发开关。磁铁3距离2表面的垂直距离为2mm。磁铁4距离PCB上表面垂直距离为2.3mm。
3和4的中心距离2的中心水平距离为6.8mm。磁铁可滑动距离为3.7mm。正常工作滑动2mm后就可以触发霍尔开关。
问题:状态1:在任意磁铁滑动到位置后,霍尔触发,若快速恢复磁铁到原位置,霍尔依然保持触发状态,且状态保持不变(实际观察过1小时以上)。
状态2:当霍尔慢速移动到位置后,在恢复到原位置,霍尔可正常工作。
这里的快速和慢速不太方便量化。请问为什么磁铁的移动速度会导致霍尔工作异常?当发生状态1后,再次按照状态2移动可恢复正常。
另外:我们将PCB板像右(方向参考图片,上下左右)移动了1.5mm。其他条件都保持不变。又恢复了正常(不清楚以后会不会出类似问题)。辛苦专家帮忙解答一下,谢谢。