Other Parts Discussed in Thread: IWR1443
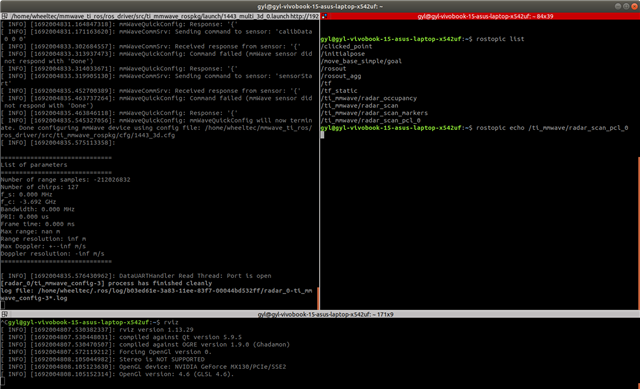
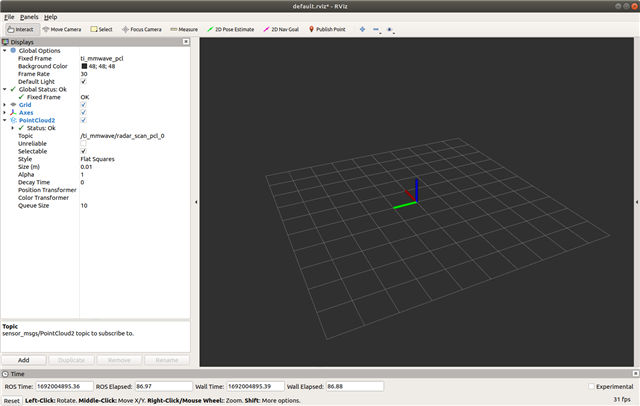
Hi Technicians, I have a problem with combining IWR1443 with NVIDIA JTX. The environment in NVIDIA JTX is Ubuntu18.04 and ROS melodic. Downloaded mmWave ROS driver with ti_mmwave_rospkg package via git clone git.ti.com/.../mmwave_ti_ros.git. The catkin_make compilation was also successful. But when I connected the IWR1443 to the NVIDIA JTX through the docking station, I ran roslaunch ti_mmwave_rospkg 1443_multi_3d_0.launch without any error or point cloud information. So I connected IWR1443 to my laptop, and also configured Ubuntu18.04 and ROS melodic. After running roslaunch ti_mmwave_rospkg 1443_multi_3d_0.launch, you can see the corresponding point cloud information. I would like to ask what may be the cause of the problem that there is no point cloud information when IWR1443 and NVIDIA JTX are combined?