

Part Number: IWR1642BOOST
Other Parts Discussed in Thread: IWR1642
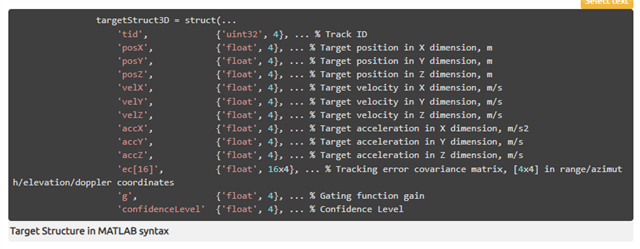
我正在使用IWR1642的traffic_monitoring_16xx来获得雷达处理好之后的数据(demo地址如下:C:\ti\mmwave_industrial_toolbox\mmwave_industrial_toolbox_3_2_0\labs\lab0013_traffic_monitoring_16xx),在项目中,我需要获得关于跟踪目标的误差协方差矩阵来判断对于雷达跟踪结果的置信程度。在官方的文件中,我找到了对于接收到的数据解析于下,其中ec[16]是跟踪误差协方差矩阵(in range/azimuth/elevation/doppler coordinates)。
在实验中,随着对同一个目标持续跟踪中,其中EC中第五个元素,也就是角度的方差会随着时间越来越大,为什么会越来越大?他的单位是什么?这第五个元素具有什么样的含义?
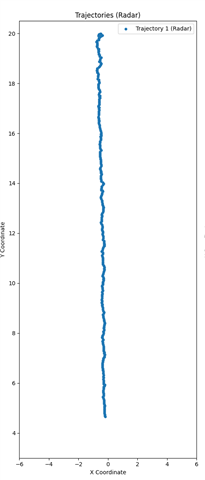
我想列出两组数据来进行具体的分析,第一组数据是单个行人沿着Y轴直线行走,其截取的部分数据和行走轨迹分别如图所示
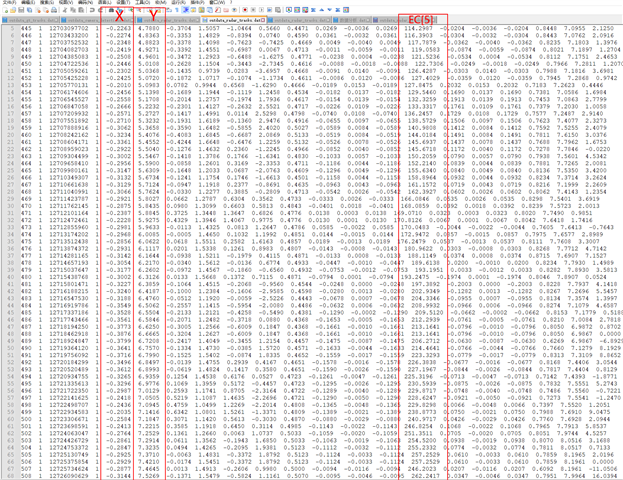
可以看到,随着Y轴的增加,EC[5]逐渐的增大。任取一帧来分析,例如480帧,此帧EC[5]=193.2475(弧度),然后EC[5]开平方得13.9013(弧度),然后将开平方结果单位转化成度得到796.4858(度),为什么会得到796.4858度?这好像不符合现实情况?
第二组数据的单个行人沿着X轴直线行走,其截取的部分数据和行走轨迹分别如图所示
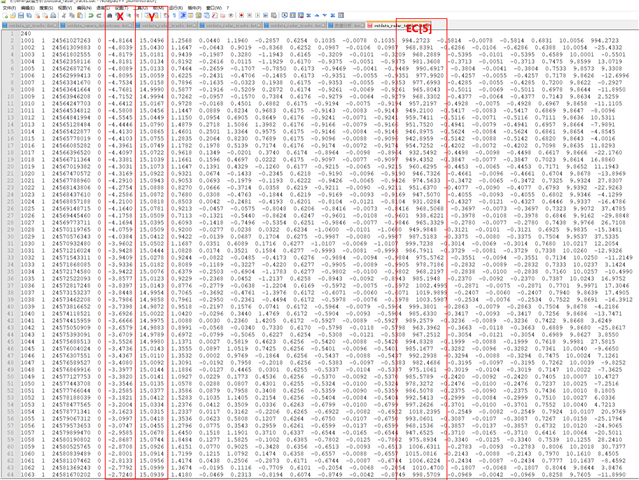
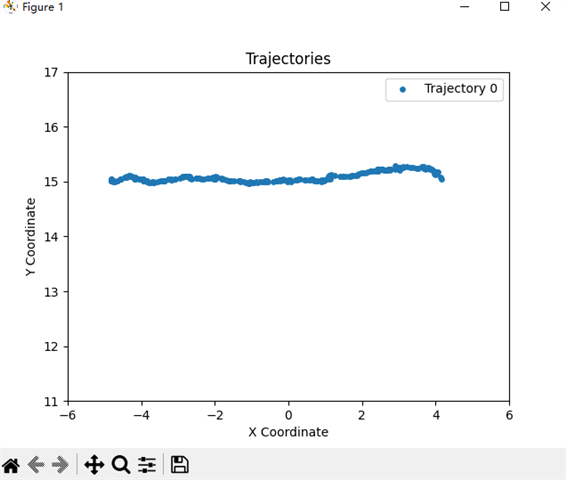
可以看到随着X轴坐标的改变,EC[5]在900-100之间波动,为什么会出现900多这么大的角度方面的数据?为什么并没有像第一组数据一样累加?
