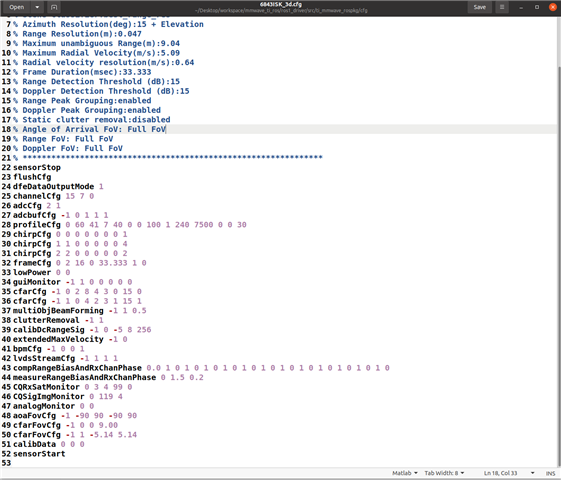
我正在使用ros控制毫米波雷达生成点云,但我不明白cfg文件中参数的具体含义,特别是与点云数量相关的参数。
具体而言,我希望衡虚预警的门槛较低,静态杂波滤除功能关闭,尽可能生成多的点云。
能否请了解这方面知识的人员向我解释参数的含义,以及如何调整这些参数来获得更多的点云?或者在哪里可以学习调整这些参数的配置?
I am using ros to control millimeter wave radar to generate point clouds, but I don't understand the specific meaning of the parameters in the cfg file, especially the parameters related to the number of point clouds.
Specifically, I hope that the threshold for virtual virtual warning is low, the static clutter filtering function is turned off, and as many point clouds are generated as possible.
Could someone please explain to me what the parameters mean and how to adjust them to get more point clouds? Or where can I learn to adjust the configuration of these parameters?