

在通过CLI自动配置 并开启雷达后
调用了以下函数:
CLI_close();
Task_Params taskParams;
Task_Params_init(&taskParams);
taskParams.priority = 3;
taskParams.stackSize = 1024;
Task_create(UART_Send_Task, &taskParams, NULL);
以此来关闭CLI 并且打开一个新的线程用于串口数据输出
进入线程后 先将串口进行close再打开
UART_close(gMmwMssMCB.commandUartHandle);
UART_Params uartParams;
UART_Params_init(&uartParams);
uartParams.clockFrequency = gMmwMssMCB.cfg.sysClockFrequency;
uartParams.baudRate = gMmwMssMCB.cfg.commandBaudRate;
uartParams.isPinMuxDone = 1U;
/* Open the UART Instance */
gMmwMssMCB.commandUartHandle = UART_open(0, &uartParams);
if (gMmwMssMCB.commandUartHandle == NULL)
{
System_printf("Error: MMWDemoMSS Unable to open the Command UART Instance\n");
return;
}
在该线程中 每帧完成后 会进行串口发送 每次都发送以下四个字节
data[0]=0x0D;data[1]=0x0A;data[2]=0x12;data[3]=0x34;
UART_write (gMmwMssMCB.commandUartHandle,(uint8_t*)&data[0],4);
但是实际接收到的却是:
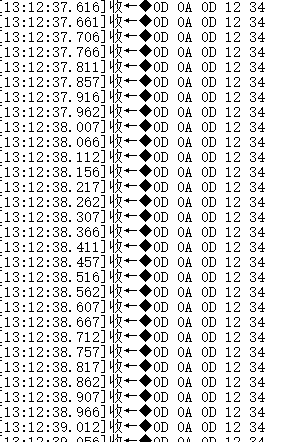
0D 0A 0D 12 34
经过多次调试发现 只要发出的数据中含有0x0A 则一定会出现数据错误
请问如何解决

