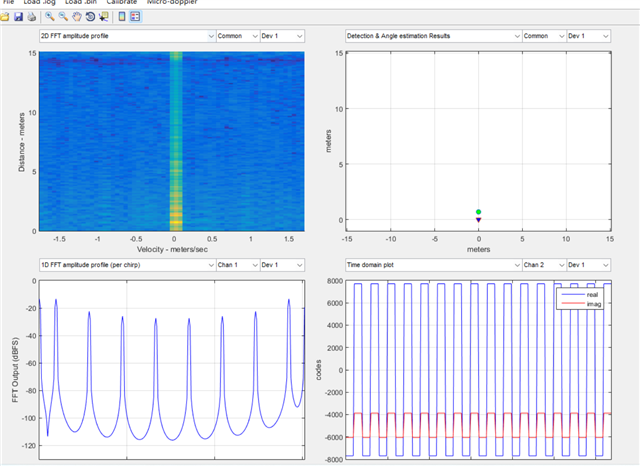
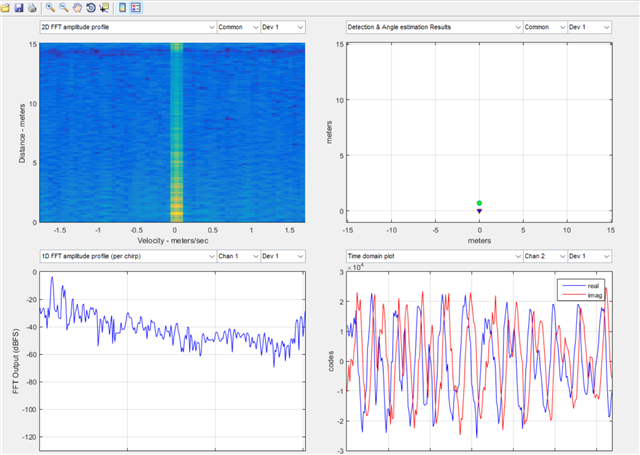
具体测试场景是雷达板前方放置一块金属板,用的参数配置均为官方提供的默认脚本,序号60之后的一维距离向存在异常,如图1所示,能否告知是什么情况,同样位置我的待测物体是金属小球就很正常
-- Profile configuration
local profile_indx = 0
local start_freq = 77 -- GHz
local slope = 79 -- MHz/us
local idle_time = 5 -- us
local adc_start_time = 6 -- us
local adc_samples = 256 -- Number of samples per chirp
local sample_freq = 8000 -- ksps
local ramp_end_time = 40 -- us
local rx_gain = 48 -- dB
local tx0OutPowerBackoffCode = 0
local tx1OutPowerBackoffCode = 0
local tx2OutPowerBackoffCode = 0
local tx0PhaseShifter = 0
local tx1PhaseShifter = 0
local tx2PhaseShifter = 0
local txStartTimeUSec = 0
local hpfCornerFreq1 = 0 -- 0: 175KHz, 1: 235KHz, 2: 350KHz, 3: 700KHz
local hpfCornerFreq2 = 0 -- 0: 350KHz, 1: 700KHz, 2: 1.4MHz, 3: 2.8MHz
-- Frame configuration
local start_chirp_tx = 0
local end_chirp_tx = 11
local nchirp_loops = 64 -- Number of chirps per frame
local nframes_master = 10 -- Number of Frames for Master
local nframes_slave = 10 -- Number of Frames for Slaves
local Inter_Frame_Interval = 100 -- ms
local trigger_delay = 0 -- us
local trig_list = {1,2,2,2} -- 1: Software trigger, 2: Hardware trigger
--
Note: "capture_time" is a timeout for this script alone to exit - it does not control the
actual duration of capture. The actual capture duration depends on the configured frame time
and number of frames.
--]]
capture_time = 2000 -- ms
inter_loop_time = 2000 -- ms
num_loops = 1
--[[
Note: Change the following three parameters as desired:
1. n_files_allocation: is the number of files to preallocate on the SSD.
This improves capture reliability by not having frame drops while switching files.
The tradeoff is that each file is a fixed 2047 MB even if a smaller number of frames are captured.
Pre-allocate as many files as needed based on (size_per_frame * number_of_frames) to be captured.
2. data_packaging: select whether to use 16-bit ADC data as is, or drop 4 lsbits and save 4*12-bit numbers in a packed form
This allows a higher frame rate to be achieved, at the expense of some post-processing to unpack the data later.
(Matlab should still be able to unpack the data using the '*ubit12' argument to fread instead of 'uint16')
The default is no-packing, for simplicity
3. capture_directory: is the filename under which captures are stored on the SSD
and is also the directory to which files will be transferred back to the host
The captures are copied to the PostProc folder within mmWave Studio
Note: If this script is called multiple times without changing the directory name, then all
captured files will be in the same directory with filename suffixes incremented automatically.
It may be hard to know which captured files correspond to which run of the script.
Note: It is strongly recommended to change this directory name between captures.
--]]
n_files_allocation = 0
data_packaging = 0 -- 0: 16-bit, 1: 12-bit
capture_directory = "MIMO_Calibration_Capture112"
num_frames_to_capture = 0 -- 0: default case; Any positive value - number of frames to capture
framing_type = 1 -- 0: infinite, 1: finite
stop_frame_mode = 0 -- 0: Frame boundary, 2: Sub-frame boundary,
-- 3: Burst boundary, 4: HW/Sub-frame triggered