Part Number: CC2340R5
Other Parts Discussed in Thread: SYSCONFIG
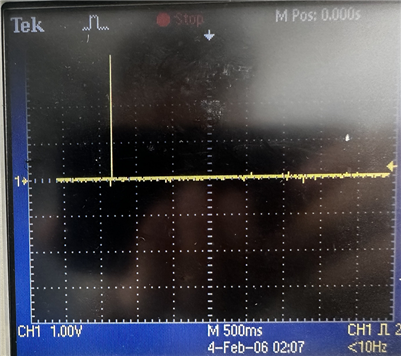
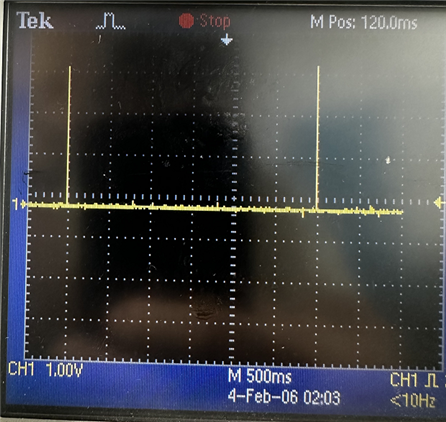
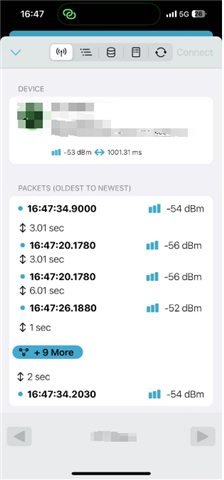
When using the rfPacketTx routine, I discovered an issue. I set a wake-up time of 1 second, and after waking up, data will be automatically sent. However, there is a possibility that this data may not be sent.
Below is my code for this part, along with a picture of the issue.
//
void tx_cfg(void)
{
/* Initialize and open RCL */
RCL_init();
Display_init();
display = Display_open(Display_Type_UART, NULL);
rclHandle = RCL_open(&rclClient, &LRF_config);
/* Set RF frequency */
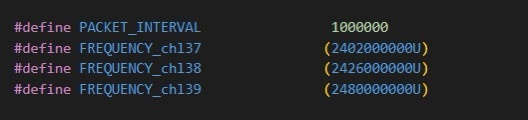
rclPacketTxCmdGenericTx.rfFrequency = FREQUENCY_chl37;
/* Start command as soon as possible */
rclPacketTxCmdGenericTx.common.scheduling = RCL_Schedule_Now;
rclPacketTxCmdGenericTx.common.status = RCL_CommandStatus_Idle;
rclPacketTxCmdGenericTx.config.fsOff = FS_OFF; // Turn off FS
/* Callback triggers on last command done */
rclPacketTxCmdGenericTx.common.runtime.callback = txCallback;
rclPacketTxCmdGenericTx.common.runtime.rclCallbackMask.value = RCL_EventLastCmdDone.value;
}
void tx_service(void)
{
uint8_t *txData;
RCL_Buffer_TxBuffer *txPacket = (RCL_Buffer_TxBuffer *)&packet_t;
txData = RCL_TxBuffer_init(txPacket, 0, 0, 25);
sendbuf_debug[24] = packet_cnt;
/* Generate a random payload */
memcpy(txData,sendbuf_debug,25);
/* Set packet to transmit */
RCL_TxBuffer_put(&rclPacketTxCmdGenericTx.txBuffers, txPacket);
rclPacketTxCmdGenericTx.common.status = RCL_CommandStatus_Idle;
/* Submit command */
RCL_Command_submit(rclHandle, &rclPacketTxCmdGenericTx);
/* Pend on command completion */
RCL_Command_pend(&rclPacketTxCmdGenericTx);
if(send_cnt>=3)
{
send_cnt = 0;
packet_cnt++;
usleep(PACKET_INTERVAL);
}
}