If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
/*
* Copyright (c) 2015-2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== uartecho.c ========
*/
/* XDCtools Header files */
#include <xdc/std.h>
#include <xdc/runtime/System.h>
/* BIOS Header files */
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
/* TI-RTOS Header files */
#include <ti/drivers/PIN.h>
#include <ti/drivers/UART.h>
/* Example/Board Header files */
#include "Board.h"
#include <stdint.h>
#define TASKSTACKSIZE 768
Task_Struct task0Struct;
Char task0Stack[TASKSTACKSIZE];
/* Global memory storage for a PIN_Config table */
static PIN_State ledPinState;
/*
* Application LED pin configuration table:
* - All LEDs board LEDs are off.
*/
PIN_Config ledPinTable[] = {
Board_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
Board_LED2 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
/*
* ======== echoFxn ========
* Task for this function is created statically. See the project's .cfg file.
*/
Void echoFxn(UArg arg0, UArg arg1)
{
char input;
UART_Handle uart;
UART_Params uartParams;
const char echoPrompt[] = "\fEchoing characters:\r\n";
/* Create a UART with data processing off. */
UART_Params_init(&uartParams);
uartParams.writeDataMode = UART_DATA_BINARY;
uartParams.readDataMode = UART_DATA_BINARY;
uartParams.readReturnMode = UART_RETURN_FULL;
uartParams.readEcho = UART_ECHO_OFF;
uartParams.baudRate = 9600;
uart = UART_open(Board_UART0, &uartParams);
if (uart == NULL) {
System_abort("Error opening the UART");
}
UART_write(uart, echoPrompt, sizeof(echoPrompt));
/* Loop forever echoing */
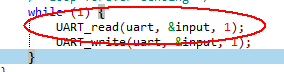
while (1) {
UART_read(uart, &input, 1);
UART_write(uart, &input, 1);
}
}
/*
* ======== main ========
*/
int main(void)
{
PIN_Handle ledPinHandle;
Task_Params taskParams;
/* Call board init functions */
Board_initGeneral();
Board_initUART();
/* Construct BIOS objects */
Task_Params_init(&taskParams);
taskParams.stackSize = TASKSTACKSIZE;
taskParams.stack = &task0Stack;
Task_construct(&task0Struct, (Task_FuncPtr)echoFxn, &taskParams, NULL);
/* Open LED pins */
ledPinHandle = PIN_open(&ledPinState, ledPinTable);
if(!ledPinHandle) {
System_abort("Error initializing board LED pins\n");
}
PIN_setOutputValue(ledPinHandle, Board_LED1, 1);
/* This example has logging and many other debug capabilities enabled */
System_printf("This example does not attempt to minimize code or data "
"footprint\n");
System_flush();
System_printf("Starting the UART Echo example\nSystem provider is set to "
"SysMin. Halt the target to view any SysMin contents in "
"ROV.\n");
/* SysMin will only print to the console when you call flush or exit */
System_flush();
/* Start BIOS */
BIOS_start();
return (0);
}
通过例程中的回显方式,可以在串口正常显示数据吗
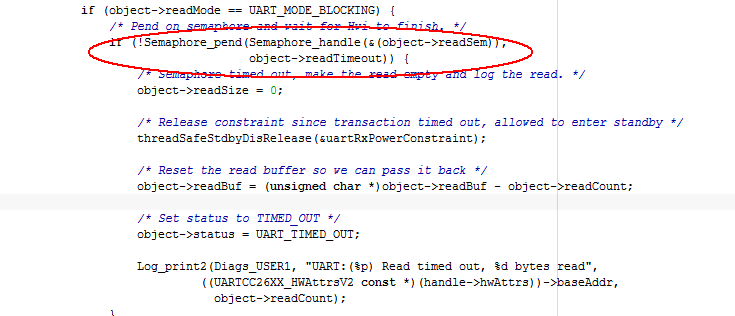
关于阻塞:UART_MODE_BLOCKING uses a semaphore to block while data is being sent. The context of calling UART_read() or UART_write() must be a Task when using UART_MODE_BLOCKING. The UART_write() or UART_read() call will block until all data is sent or received, or the write timeout or read timeout expires, whichever happens first.