Part Number: LP-CC2652RB
Other Parts Discussed in Thread: CC2652RB
Hi Ti,
在开发过程中,我遇到一个很奇怪的问题。
我的代码是基于 simplelink_cc13x2_26x2_sdk_4_30_00_54 的 spimaster_CC2652RB_LAUNCHXL_tirtos_ccs 例程修改而来;
MCU 是 CC2652RB
我点 RUN->Debug 后,等编译下载完成后点 Resume 程序可以正常运行;
但是当我点 Suspend --> Restart --> Resume 后,程序总是卡在下图中的循环中。(我试了很多遍)
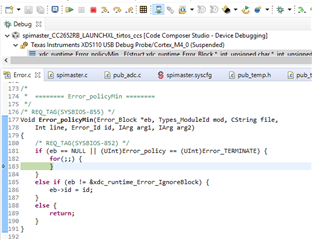
我想请教一下上面这个函数是由于什么错误触发的,或者有可能是什么原因导致的。
多谢