Other Parts Discussed in Thread: CC1352P
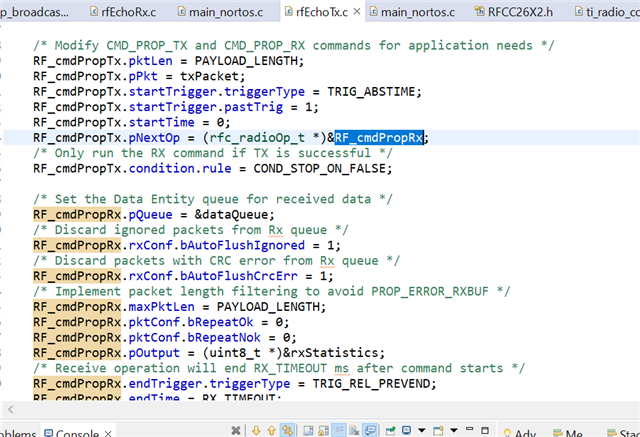
rfEchoTx和rfEchoRx的分别会有一个接收信号强度,我用这个接收信号强度为条件,控制一个IO口的输出值作为射频开关的切换条件,当接收信号强度降低一定阈值后,缩短发送时间,并变换IO值,一共进行四次,选择四次中接收信号强度最高的那次IO输出值作为继续正常发送状态的开关值,我对rfEchoTx代码进行了以下改动:
#define PACKET_INTERVAL_CHANGE (uint32_t)(4000000*0.5f)定义了缩短发送时间的时间间隔0.5s;
/* Get current time */
curtime = RF_getCurrentTime();
int state = 0;//If the state is 1, normal communication is corrected, and the state switch is 0.With an initial value of 0, initialization begins
float LastRssi = -300;//Record the last received signal strength, the initial value is a small value
int maxAnt = 0;//天线端口选择信号,0_ant00,1_ant01,2_ant10,3_ant11定义state表示当前是正常发送时间间隔还是缩短发送时间间隔,LastRssi记录上一次接收到的接收信号强度;
while(1)
{
/* Create packet with incrementing sequence number and random payload */
if(state){
txPacket[0] = (uint8_t)(seqNumber >> 8);
txPacket[1] = (uint8_t)(seqNumber++);
uint8_t i;
for (i = 2; i < PAYLOAD_LENGTH; i++)
{
txPacket[i] = rand();
}
/* Set absolute TX time to utilize automatic power management */
curtime += PACKET_INTERVAL;
RF_cmdPropTx.startTime = curtime;
//GPIO_toggle(CONFIG_GPIO_0);
//uint8_t ant = GPIO_read(CONFIG_GPIO_0);
/* Transmit a packet and wait for its echo.
* - When the first of the two chained commands (TX) completes, the
* RF_EventCmdDone event is raised but not RF_EventLastCmdDone
* - The RF_EventLastCmdDone in addition to the RF_EventCmdDone events
* are raised when the second, and therefore last, command (RX) in the
* chain completes
* -- If the RF core successfully receives the echo it will also raise
* the RF_EventRxEntryDone event
* -- If the RF core times out while waiting for the echo it does not
* raise the RF_EventRxEntryDone event
*/
RF_EventMask terminationReason =
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropTx, RF_PriorityNormal,
echoCallback, (RF_EventCmdDone | RF_EventRxEntryDone |
RF_EventLastCmdDone));
if(rxStatistics.lastRssi < LastRssi -30 ){
state = 0;
LastRssi = rxStatistics.lastRssi;
}
else{
state = 1;
LastRssi = rxStatistics.lastRssi;
}
}
else{
int currAnt = 0;//Current antenna status(0_ant00,1_ant01,2_ant10,3_ant11)
float currRssi;
float maxRssi;
txPacket[0] = (uint8_t)(seqNumber >> 8);
txPacket[1] = (uint8_t)(seqNumber++);
uint8_t a;
for (a = 2; a < PAYLOAD_LENGTH; a++)
{
txPacket[a] = 0;
}
GPIO_write(CONFIG_GPIO_0,0);
curtime += PACKET_INTERVAL_CHANGE;
RF_cmdPropTx.startTime = curtime;
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropRx, RF_PriorityNormal,
echoCallback, (RF_EventRxEntryDone |
RF_EventLastCmdDone));
currRssi = rxStatistics.lastRssi;
maxRssi = currRssi;
maxAnt = currAnt;
currAnt++;
txPacket[0] = (uint8_t)(seqNumber >> 8);
txPacket[1] = (uint8_t)(seqNumber++);
uint8_t b;
for (b = 2; b < PAYLOAD_LENGTH; b++)
{
txPacket[b] = 3;
}
curtime += PACKET_INTERVAL_CHANGE;
RF_cmdPropTx.startTime = curtime;
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropRx, RF_PriorityNormal,
echoCallback, (RF_EventRxEntryDone |
RF_EventLastCmdDone));
currRssi = rxStatistics.lastRssi;
if(currRssi>maxRssi){
maxRssi = currRssi;
maxAnt = currAnt;
}
currAnt++;
txPacket[0] = (uint8_t)(seqNumber >> 8);
txPacket[1] = (uint8_t)(seqNumber++);
uint8_t c;
for (c = 2; c < PAYLOAD_LENGTH; c++)
{
txPacket[c] = 2;
}
GPIO_write(CONFIG_GPIO_0,0);
curtime += PACKET_INTERVAL_CHANGE;
RF_cmdPropTx.startTime = curtime;
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropRx, RF_PriorityNormal,
echoCallback, (RF_EventRxEntryDone |
RF_EventLastCmdDone));
currRssi = rxStatistics.lastRssi;
if(currRssi>maxRssi){
maxRssi = currRssi;
maxAnt = currAnt;
}
currAnt++;
txPacket[0] = (uint8_t)(seqNumber >> 8);
txPacket[1] = (uint8_t)(seqNumber++);
uint8_t d;
for (d = 2; d < PAYLOAD_LENGTH; d++)
{
txPacket[d] = 3;
}
GPIO_write(CONFIG_GPIO_0,1);
curtime += PACKET_INTERVAL_CHANGE;
RF_cmdPropTx.startTime = curtime;
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropRx, RF_PriorityNormal,
echoCallback, (RF_EventRxEntryDone |
RF_EventLastCmdDone));
currRssi = rxStatistics.lastRssi;
if(currRssi>maxRssi){
maxRssi = currRssi;
maxAnt = currAnt;
}
state = 1;
if(maxAnt < 2){
GPIO_write(CONFIG_GPIO_0,0);//Set the antenna optimally
}
else{
GPIO_write(CONFIG_GPIO_0,1);
}
}然后在进行发送时,初始state变量为0,进入到缩短时间间隔的发送状态,然后进行四次发送,完成后state置为1,下次进入到正常时间间隔的发送状态;
我的问题,当我开始发送时,进入到缩短时间间隔的发送状态后,无法接收到由RX端回传回来的数据,TX板子的红灯常亮,直到四次发送完成退出缩短发生时间间隔后的状态,接收回传信号就正常了,请问会是什么问题呢?