模拟
模拟 汽车
汽车 DLP® 技术
DLP® 技术 嵌入式处理
嵌入式处理 工业
工业 电源管理
电源管理
在工业环境中,每天需要处理不同形状、尺寸、材料和光学特性(如反射比、吸收等)的零件。这些零件必须以特定的方向挑选和放置,然后进行加工。将这些零件随机从存放的环境(容器或其他)中自动挑选并放置的活动通常被称为箱拣。但这对机器人末端执行器(一种连接到机械臂末端的设备)提出了挑战,它需要准确地知道要抓取物体的3D位置、尺寸及其想方向。为了做到在箱子外壁和箱内其他物体周围准确导航,机器人的机器视觉系统除了需要获取2D相机信息外,还需要获取深度信息。
对于箱拣来说,捕获物体3D影像的难题可以由结构光技术解决。基于结构光技术的3D扫描仪/相机通过将一系列图案投射到被扫描的物体上而工作,并且用相机或传感器来捕获图案失真。然后三角剖分算法计算数据并输出3D点云。图像处理软件(如MVTech开发的Halcon)计算物体位置和机械臂的最佳进场路线(图1)。
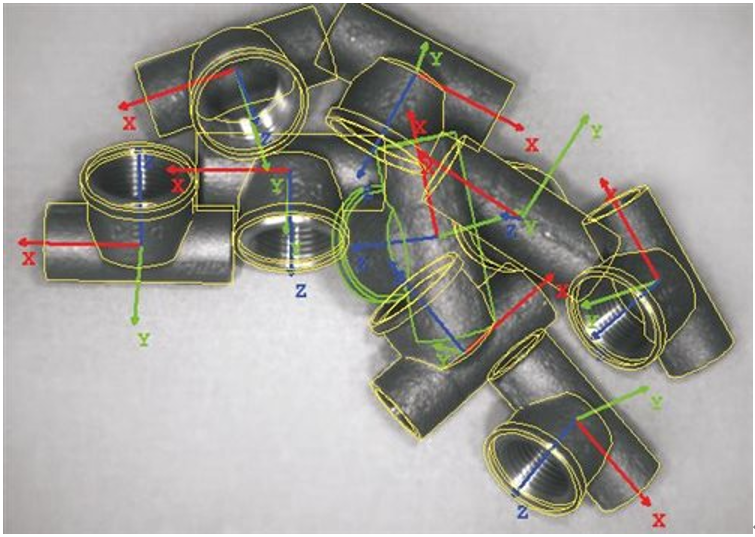
图1:使用Halcon将管接头与其各自的3D模型进行匹配的示例(来源:MVTech开发的H…