

你好,
最开始我在做实验的时候,我是按照默认的参数设置,仅仅是把帧数该到了150帧,测试的是人从远处走向雷达的实验,而且我通过matlab处理后的结果也说明了数据确实是正确的。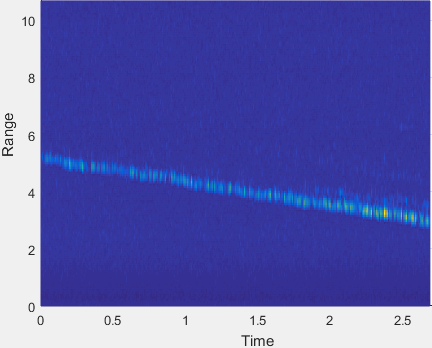
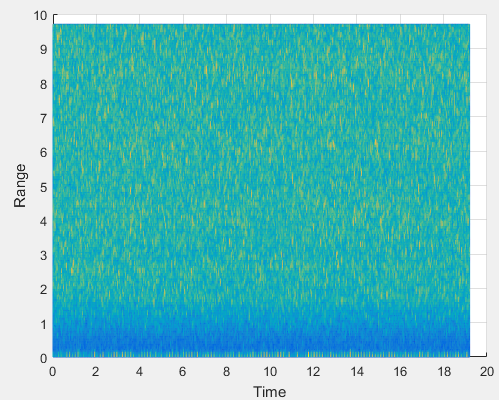
但是当我想改变每一个chirp的时间,让实验的时间更长的时候,我处理出来的结果却不对。但是PostProc的结果却又好像是正确的。
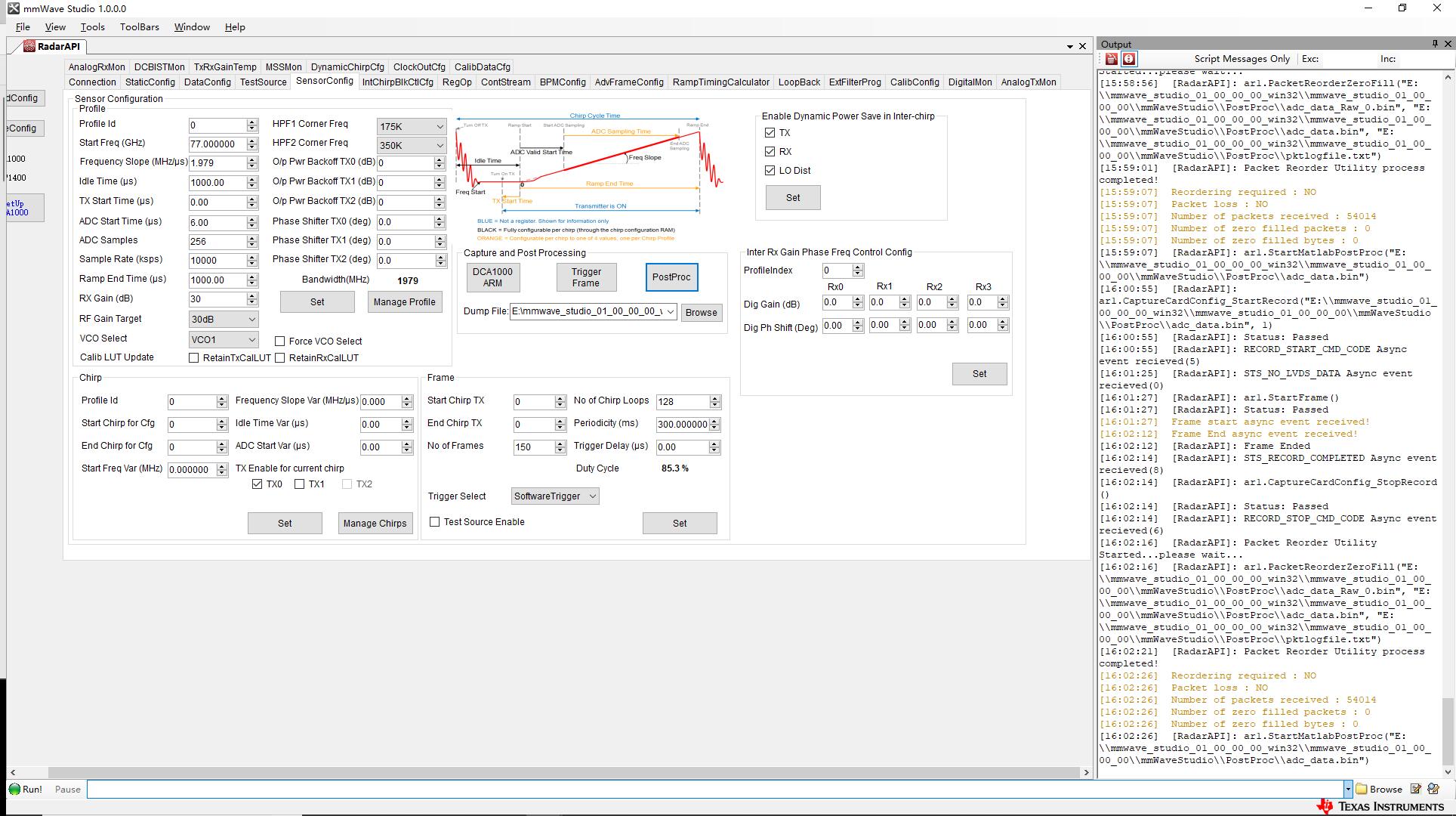
能不能告诉我。什么样的参数设置才是合理???
谢谢
你好,
最开始我在做实验的时候,我是按照默认的参数设置,仅仅是把帧数该到了150帧,测试的是人从远处走向雷达的实验,而且我通过matlab处理后的结果也说明了数据确实是正确的。
但是当我想改变每一个chirp的时间,让实验的时间更长的时候,我处理出来的结果却不对。但是PostProc的结果却又好像是正确的。
能不能告诉我。什么样的参数设置才是合理???
谢谢
