

你好,
我在查看Industrial Toolbox 4.7.0/Labs/People Counting/ 68xx-Overhead 3D People Counting/ User's Guide这个手册时,
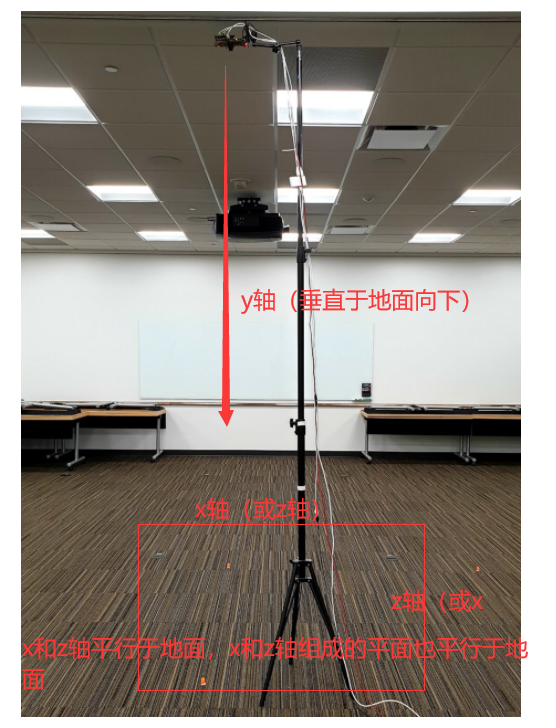
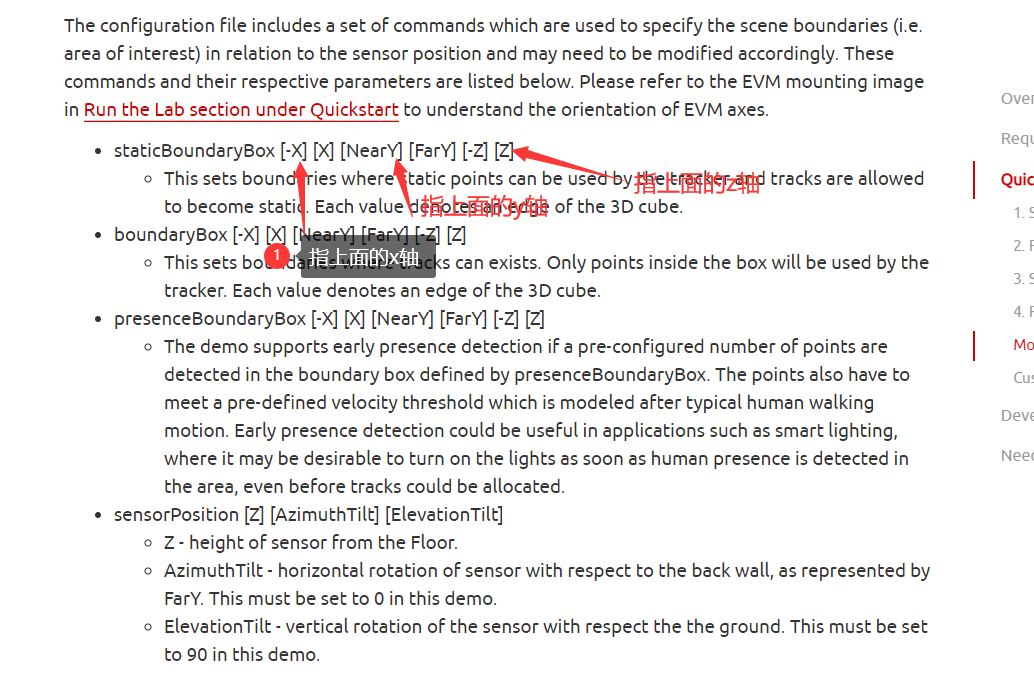
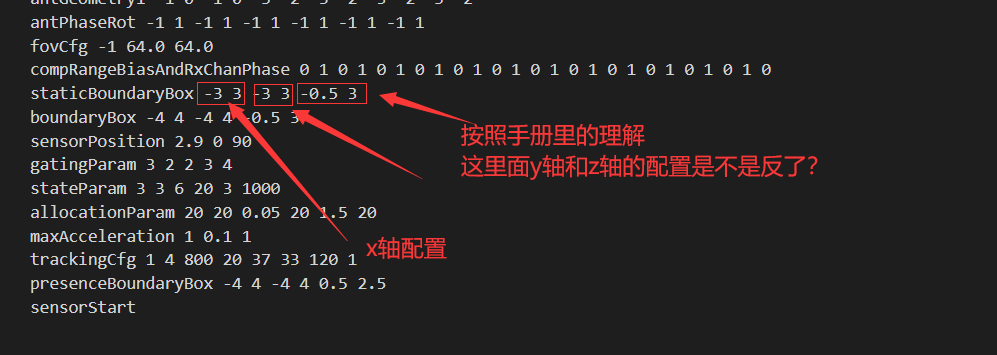
遇到如下疑问:pc_6843_3d_aop_overhead_3m_radial.cfg 这个配置文件里面的staticBoundarybox中y轴和z轴的配置是不是反了?
还是我对手册的理解不对?(如下图)
谢谢
你好,
我在查看Industrial Toolbox 4.7.0/Labs/People Counting/ 68xx-Overhead 3D People Counting/ User's Guide这个手册时,
遇到如下疑问:pc_6843_3d_aop_overhead_3m_radial.cfg 这个配置文件里面的staticBoundarybox中y轴和z轴的配置是不是反了?
还是我对手册的理解不对?(如下图)
谢谢
