Part Number: DS90UB983-Q1
Other Parts Discussed in Thread: DS90UH984-Q1
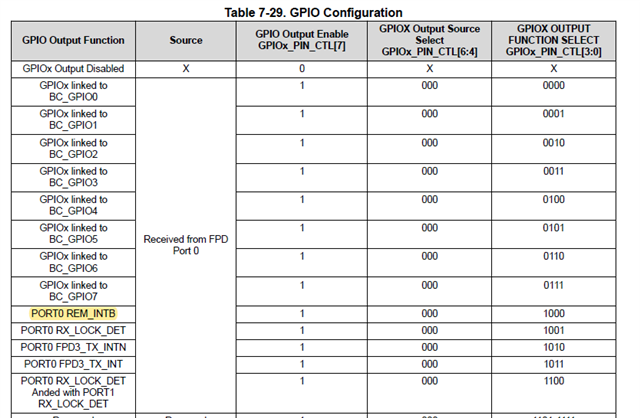
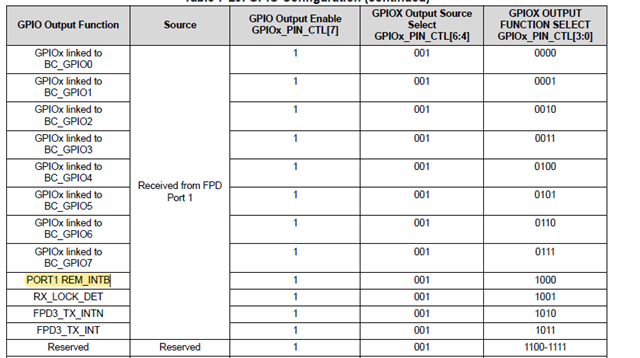
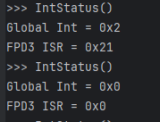
We want to know how to use two interrupts at the same time to support the touch of two screens.
We are using a DS90UB983 as the add-serializer and DS90UB944 and DS90UB948 as the deserializers. Can 983 support this?
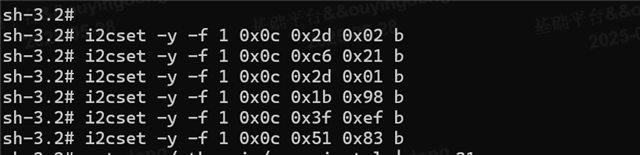
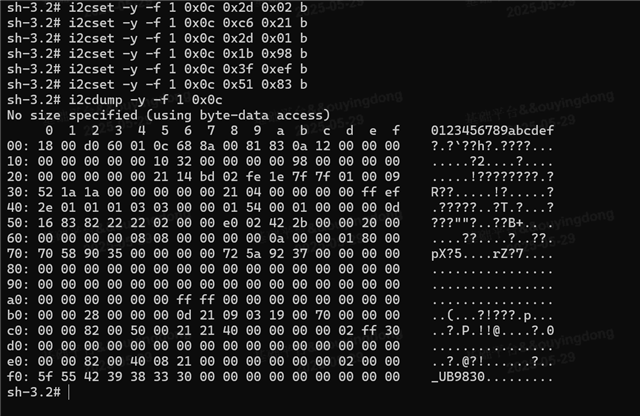
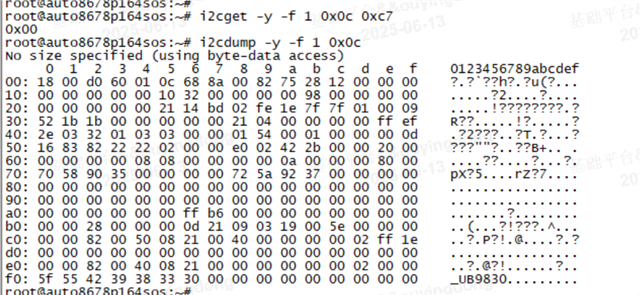
Please send the 983 configuration that supports two different deserializer interrupts?