

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-AM261 工具/软件:
大家好!
客户正在使用 MCU+ SDK 10.2和起点 empty_am261x-lp_r5fss0-0_freertos_ti-arm-clang 示例。
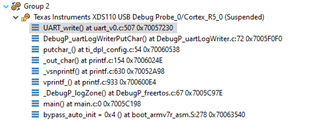
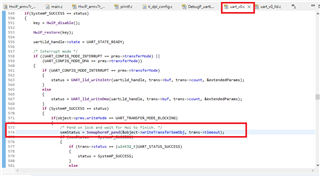
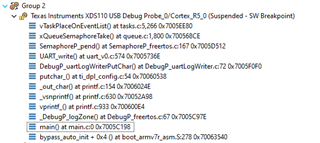
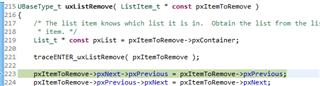
它们遇到了一个问题、即在电路板和驱动程序初始化函数之后、任务创建之前的初始化阶段使用 DebugP_LOG API 时、执行会卡住。 可以在任务函数中使用 DebugP_LOG API。
在创建任务之前是否有办法使用 DebugP_LOG API?
谢谢!
-- Gunter

 、
、  。
。