请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2612 工具/软件:
您好、
我的客户对 VIM(矢量中断管理器)有一些疑问。 你能帮助回答他们在下面的问题吗?
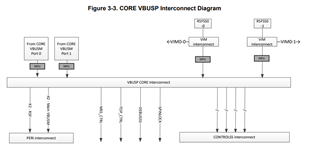
1.你能告诉他们 VIM0 和 VIM1 之间有什么区别吗?
2.这些是否与 TRM 中图 3-3 所示的 VIM0-0 和 VIM0-1 相同?

3.你能告诉他们一个用例如何使用这两个 VIM0/1 不同?
谢谢。此致、
英明
工具/软件:
您好、
我的客户对 VIM(矢量中断管理器)有一些疑问。 你能帮助回答他们在下面的问题吗?
1.你能告诉他们 VIM0 和 VIM1 之间有什么区别吗?
2.这些是否与 TRM 中图 3-3 所示的 VIM0-0 和 VIM0-1 相同?
3.你能告诉他们一个用例如何使用这两个 VIM0/1 不同?
谢谢。此致、
英明