

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-AM243主题: SysConfig 中讨论的其他器件
工具/软件:
您好团队:
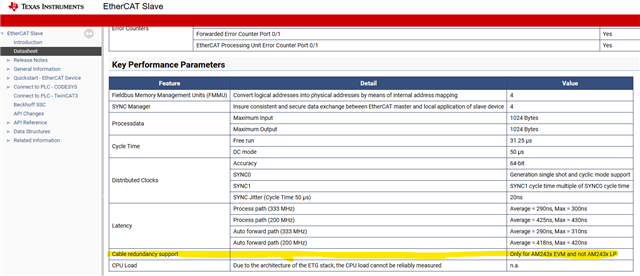
在查看工业通信 SDK 中的 EtherCAT 从站数据表时、我发现电缆冗余支持存在差异。
似乎只有 AM243x EVM 支持此功能、而 LP 则不支持。
您能告诉我为什么吗?
此致、
TED
工具/软件:
您好团队:
在查看工业通信 SDK 中的 EtherCAT 从站数据表时、我发现电缆冗余支持存在差异。
似乎只有 AM243x EVM 支持此功能、而 LP 则不支持。
您能告诉我为什么吗?
此致、
TED
