Other Parts Discussed in Thread: AM2634, SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2634主题: SysConfig 中讨论的其他器件
工具/软件:
尊敬的专家
客户将具有 3 个节点连接的 CAN 系统设置为:一个 CAN 框设置为 CAN FD、第二个 CAN 框设置为经典 CAN、以及 AM2634 MCAN0 设置为 CAN FD 中的某些通道、其中某些通道采用经典 CAN。
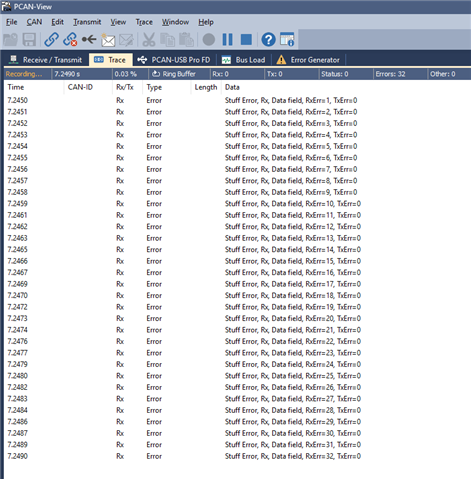
3 个节点之间的通信效果良好、而 AM2634 仅发送/接收 CAN FD 消息或仅发送/接收传统 CAN 消息。 但是、在启用 AM2634 发送/接收 CAN FD 和传统 CAN 后、将发生许多错误帧。
客户还测试 F280039 以替换 CAN 总线中的 AM2634、即使 F280039 同时发送/接收 CAN FD 和传统 CAN、通信也能正常工作。
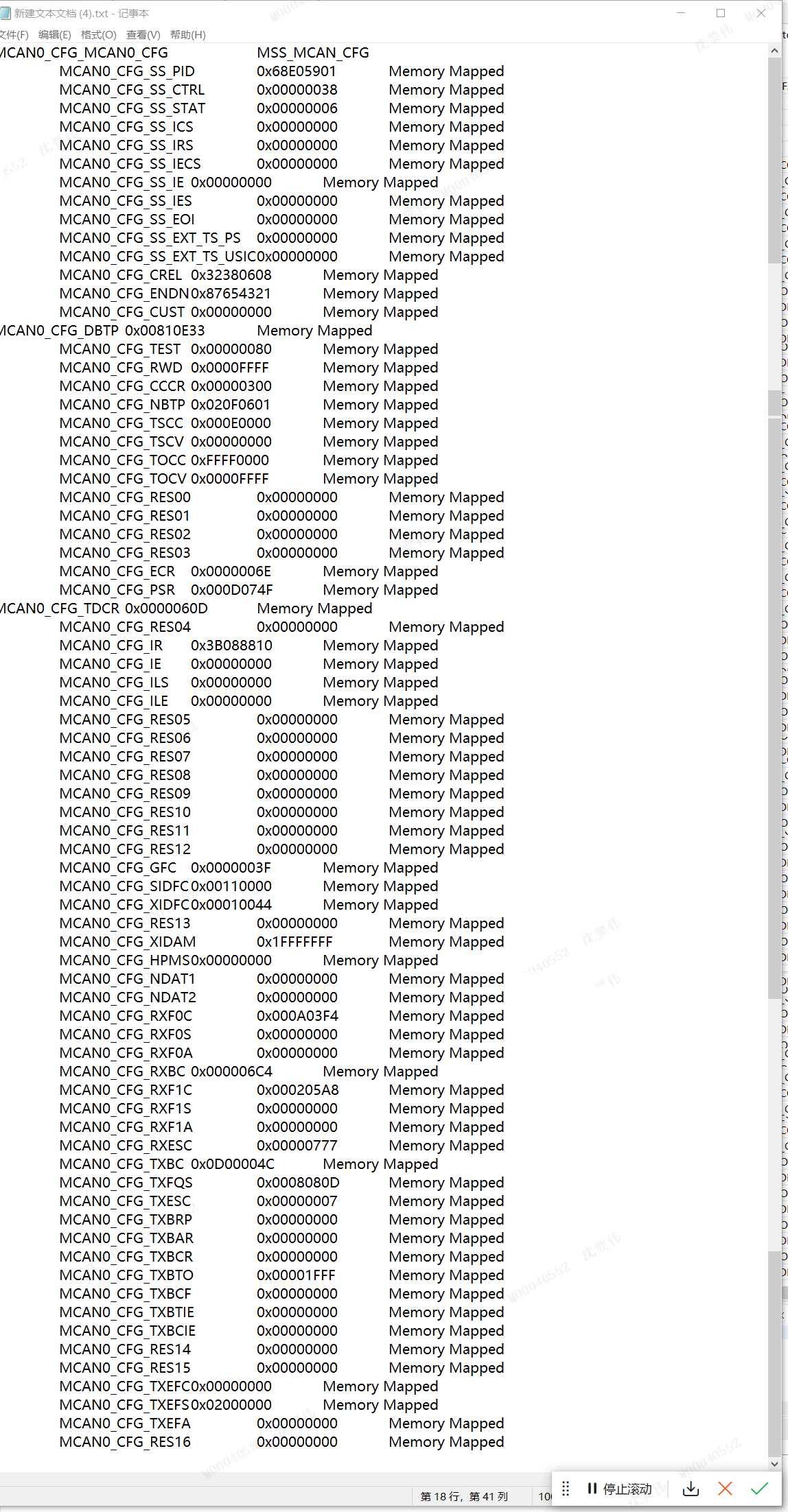
我们仔细检查 F280039 和 AM2634 之间的 MCAN 所有寄存器设置、除了 F280039 MCAN 时钟设置为 40Mhz /(7+1) 和 AM2634 MCAN 时钟设置为 80Mhz /(15+1) 之外、几乎有相同的设置。
如果 F280039 和 AM2634 MCAN 模块之间的任何其他差异可能仅在 AM2634 中发生错误帧、我们是否会得到建议?