Other Parts Discussed in Thread: TIDA-01527, AM263P4, SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: AM263P4
主题: SysConfig 中讨论的其他器件
您好、
参考文献:mcu_plus_sdk_am263px_10_02_00_15、AM263P 技术参考手册(2025 年 7 月)
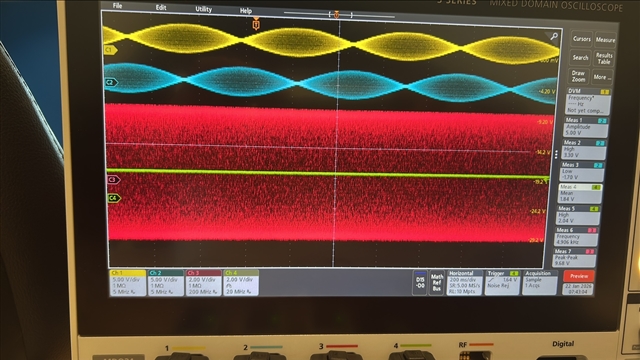
RDC_SEQUENCE_MODE_0 中有单模式旋转变压器、可在激励频率振幅为 140 时生成 5kHz 激励。 有两个故障、我无法确定如何清除。
- 激励频率降级诊断正弦和余弦计数在 218/219 到 469 之间切换、而预期计数应介于 450 和 550 之间。 我在示波器中看到 sin 和 cos 过零在 5kHz 条件下发生、但此故障仍在清除。
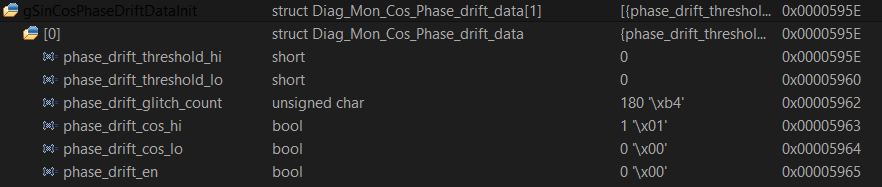
 2.正弦/余弦增益漂移和余弦相漂移故障在正向方向触发,但在负转速方向清除。此外、我还观察到、 在调用其各自设置函数 Rdc_setDiagnosticSinCosGainDriftData 和 Rdc_setDiagnosticsCosPhaseDriftData 时、gain_drift_threshold_hi、gain_drift_threshold_low、phase_drift_hi 和 phase_drift_lo 会被清除 。 我不确定这是有意为之、还是其他 SDK 版本中已修复的问题。
2.正弦/余弦增益漂移和余弦相漂移故障在正向方向触发,但在负转速方向清除。此外、我还观察到、 在调用其各自设置函数 Rdc_setDiagnosticSinCosGainDriftData 和 Rdc_setDiagnosticsCosPhaseDriftData 时、gain_drift_threshold_hi、gain_drift_threshold_low、phase_drift_hi 和 phase_drift_lo 会被清除 。 我不确定这是有意为之、还是其他 SDK 版本中已修复的问题。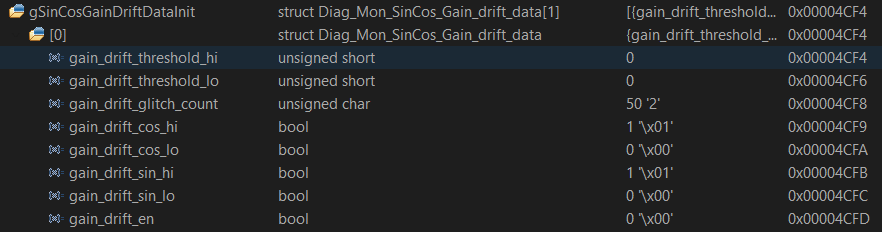
 那么、我有一个问题是如何清除上述故障?
那么、我有一个问题是如何清除上述故障?