请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: AM263P4
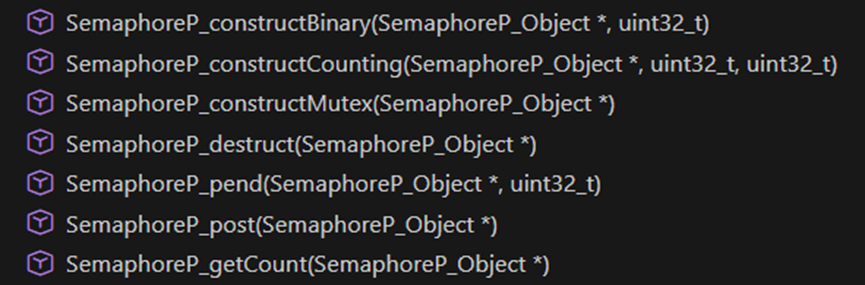
预发布 MCAL 11.01.00.07 中的 FLS_BOOT_APP 示例是否在使用 OS 的应用程序中使用 TRNG、AES、SHA 和其他功能进行了测试? 目前、我们观察到、TRNG 和 AES 等功能在没有操作系统的应用中正常运行。 OS 的存在是否会影响这些函数可能依赖的 SemaphoreP_Pend (HwiP_disable() 和 HwiP_restore) 调用?
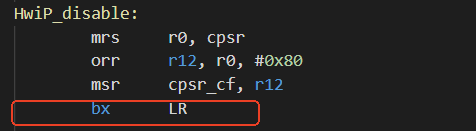
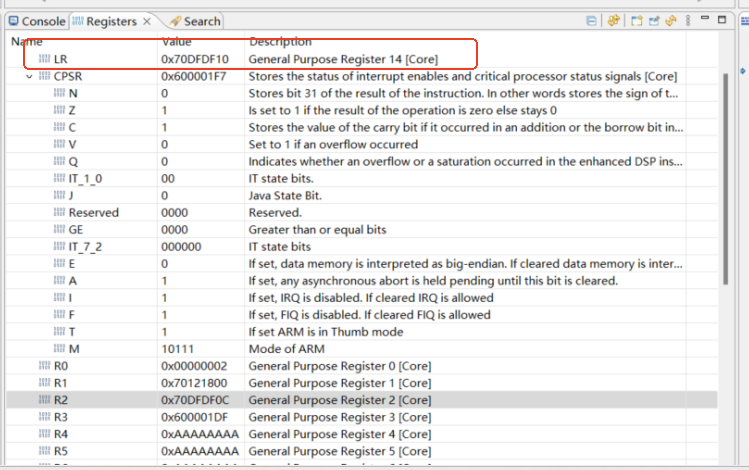
此外、在调试期间、我们发现在进入 HwiP_disable 后、LR 寄存器指向非法地址、导致其跳转到未定义的中断服务例程。 这可能是由于中断冲突造成的、因为我们的操作系统也使用了大量中断。