请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:RM42L432 主题中讨论的其他器件:CCStudio、 HALCOGEN、 TCAN337、
我的 TI HERCULE (RM42L432PZ)的 CAN 存在问题。
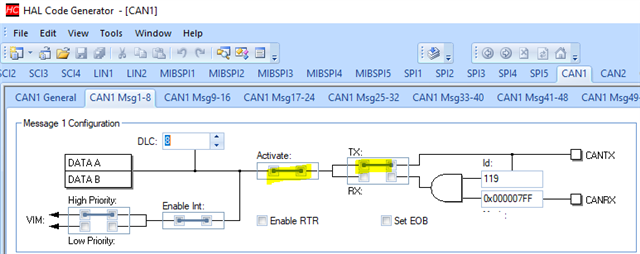
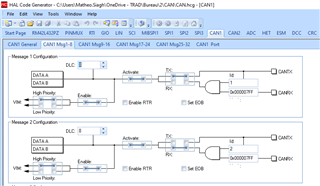
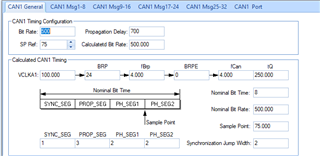
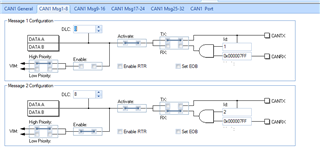
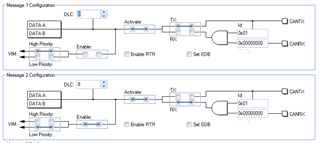
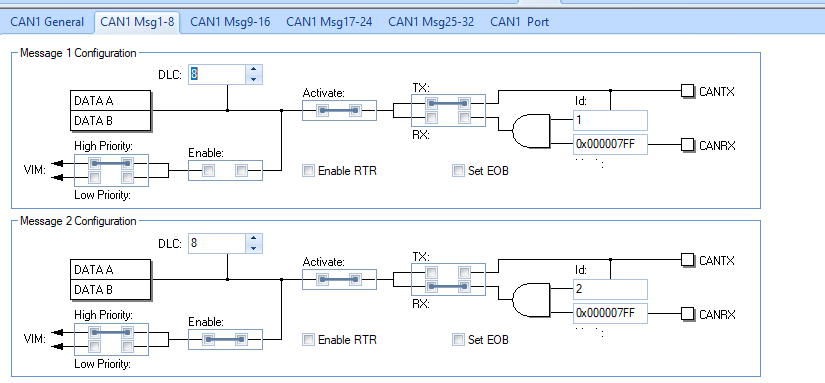
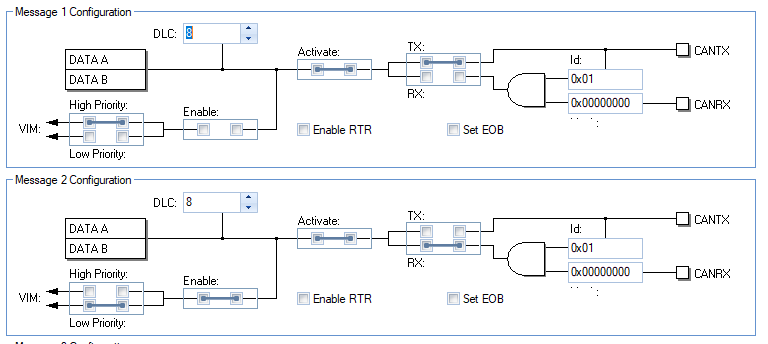
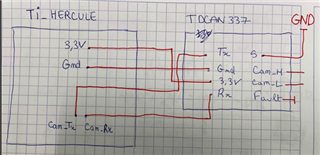
我添加了一个 CAN 收发器(TCAN337)、我按照 Halcogen 和 CCStudio 上的 tutto 来为我的 TI HERCULE 生成 CAN 的库和驱动程序。
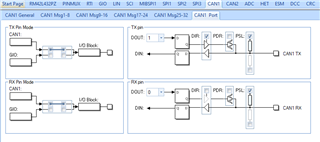
但是当我使用函数 canTransmit()发送数据时,不会发生任何情况,CAN1的输出没有信号。 我的程序中没有任何错误、我的函数返回成功。 此外、我还使用 Arduino 测试了 TCAN37、我没有遇到任何问题。
我不知道问题是在哪里出现的。
Matheo S.
void Send(uint8_t *tab_TX){
while(1){ /*Infinite loop*/
canTransmit(canREG1, canMESSAGE_BOX1, *tab_TX); /* Transfer data on CAN's port*/
sciSend(scilinREG, 15, (unsigned char *)"SEND CAN TRAM\n\r"); /*Send on Serial's console information*/
delay_second(5);
}}
void main(void)
{ _enable_IRQ();
canInit();
sciInit();
uint8_t data[8]={'D','A','T','A','S','E','N','D'};
Send(data);
}