请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1292NCPDT 您好!
通过 UART0发送数据时、微控制器的 UART 传输存在问题
在白蚁端子中观察它时、一些数据串会被切成一半(图像1)
、或者字符串中有空格(图像2)、您能给我任何建议来解决这个问题吗? :)
梅拉
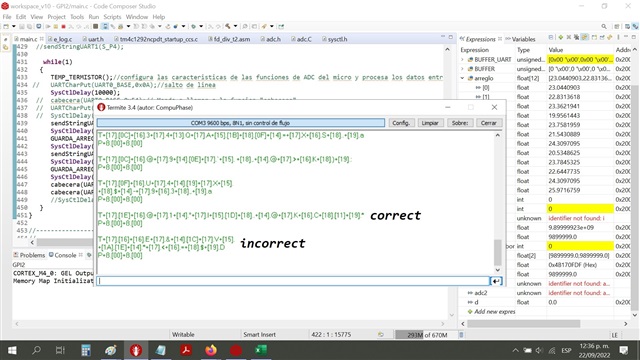
图1.
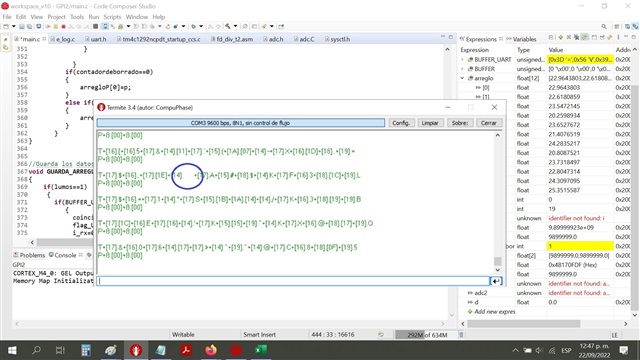
图2.
您好!
通过 UART0发送数据时、微控制器的 UART 传输存在问题
在白蚁端子中观察它时、一些数据串会被切成一半(图像1)
、或者字符串中有空格(图像2)、您能给我任何建议来解决这个问题吗? :)
梅拉
图1.
图2.