请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 大家好!我认为我遇到了问题、希望能得到您的帮助。我最近一直在研究雷达跟踪算法、请参阅 TI 文档"Tracking_radar_targets_in_multiple_refless_points.pdf"。下载链接 为 e2e.ti.com/.../Tracking_5F00_radar_5F00_targets_5F00_with_5F00_multiple_5F00_reflection_5F00_points.pdf。
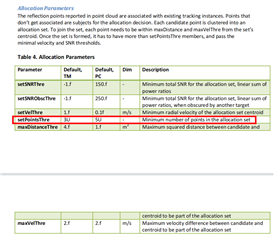
目前,我不清楚雷达算法参数配置如何影响雷达识别效果。例如,在第4.2.2节中,如果我将 setPointsThre 的值从5U 更改为1U, 我是否会看到多辆汽车而不是一辆汽车?是否有方法可以模拟雷达算法参数调整对雷达识别的影响?类似这样