

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 工具/软件:Code Composer Studio
我正在使用 TX 软件 FIFO 和 RX 软件 FIFO 来开发 CANBUS 库。
我实现了接收数据并在 ISR 中放入 RX FIFO。 但是、当程序大约接收3-4次(随机)的消息时、它会转到 FaultISR。
然后、我找到问题所在、并在函数 CANMessageGet 中发现它存在故障。 然后、我使用以下文档 http://www.ti.com/lit/an/spma043/spma043.pdf 中的诊断方法。
我发现程序总是以2个不同的代码停止。
1) 1)在 CANBUS driverlib 的函数_CANDataRegRead 中。
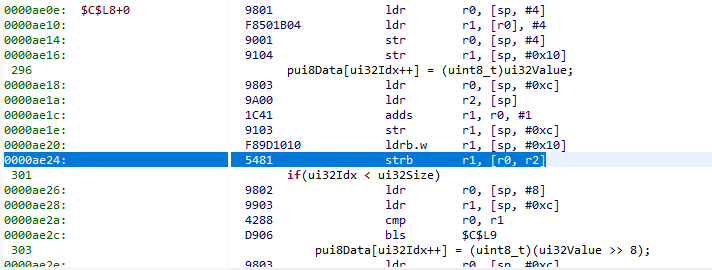
2)在 编译器的 lib/src/memcpy_t2.asm 文件中。

我尝试找到更多解决方案。 并发现线程 Mdoe 和句柄模式不能同时调用函数 CANMessageSet 和 CANMessageGet。 然后、我在调用函数之前放置 IntDisable、并将 IntEnable 放置在线程模式代码中、以防止同时调用该2函数。 但问题仍然存在。
我现在不知道。 有人能帮助男人吗?

