请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2634 主题中讨论的其他器件:SysConfig
工具与软件:
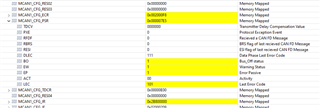
您好,我试图让 ECU 进入总线关闭做一些事情,在 If_Controller 26200Off,但没有总线关闭处理程序(can_mcanProcessBusOff),也没有 呼叫 If_Controller 26200Off. 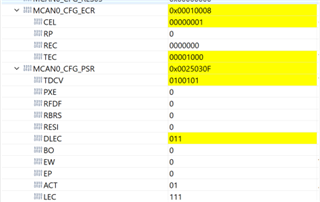
传输计数器会增加、但中的总线关闭标志从不升高。
您可以指导如何提高总线关闭标志吗?
我在 Canwrite 上放置一个断点、以使 ECU 在发送之前停止、然后将 CANHigh 和 CANLow 短接至 Go。
您的、
Abdelrhman Afifi