

Other Parts Discussed in Thread: PCM1808
器件型号: PCM1808
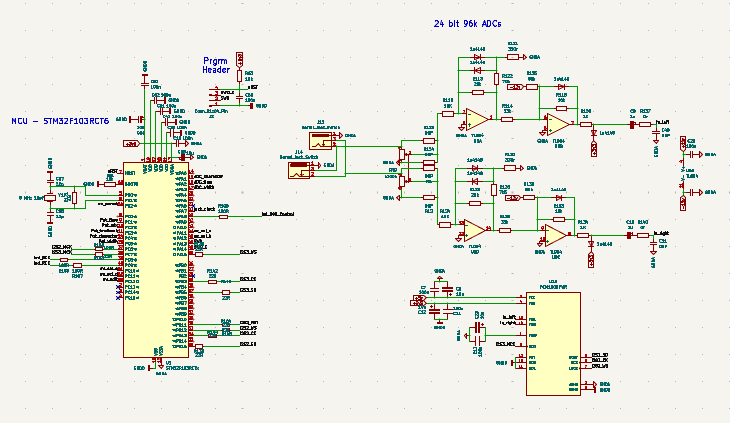
我设计了一个板、该板从经过调节的+/–5Vpp 输入将数据输入到 PCM1808 ADC 芯片中、但我无法让 I2S 使用 STM32F103 处理器。 我附上了 schamatics 和用于在 STM32F103 上启动 I2S 数据流的代码片段。
代码:
/*
I2S_ADC.c
*/
#include “includes.h"</s>“
静态 GPIO_InitTypeDef GPIO_INIT_struct;
静态 DMA_InitTypeDef DMA_INIT_STRUCT;
静态 TIM_TimeBaseInitTypeDef TIMER_InitStruct;
静态 NVIC_InitTypeDef NVIC_InitStruct;
静态 I2S_InitTypeDef I2S_INIT_struct;
//去隔行到左和右进程缓冲区
void start_process (uint16_t start_val)
{
for (uint16_t i = start_val;i < start_val + audio_half_size;i ++)
{
Process_Buffer[I/2][I%2]= Audio_Rx_Buffer [i];
}
}
// ADC 初始化
void SPIADC_Configuration (void)
{
//配置 GPIO
GPIO_PinRemapConfig (GPIO_Remap_SPI3、ENABLE);
//设置引脚 GPIOA I2S
GPIO_init_struct.GPIO_Pin = GPIO_PIN_15;
GPIO_INIT_STRUCT.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_init_struct.GPIO_Speed = 50MHz;
GPIO_Init (GPIOA、&GPIO_init_struct);
//设置引脚 GPIOB I2S
GPIO_init_struct.GPIO_Pin = GPIO_PIN_3;
GPIO_INIT_STRUCT.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_init_struct.GPIO_Speed = 50MHz;
GPIO_Init (GPIOB、&GPIO_init_struct);
//设置引脚 GPIOB I2S
GPIO_init_struct.GPIO_Pin = GPIO_PIN_5;
GPIO_init_struct.GPIO_Mode = GPIO_Mode_in_float;
GPIO_init_struct.GPIO_Speed = 50MHz;
GPIO_Init (GPIOB、&GPIO_init_struct);
//设置引脚 GPIOC MCK
GPIO_init_struct.GPIO_Pin = GPIO_PIN_7;
GPIO_INIT_STRUCT.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_init_struct.GPIO_Speed = 50MHz;
GPIO_Init (GPIOC、&GPIO_init_struct);
//将 NVIC 设置为 DMA 传输
NVIC_InitStruct.NVIC_IRQChannel = DMA2_Channel1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd =启用;
NVIC_Init (&NVIC_InitStruct);
//配置 I2S (SPI3)
DMA_DeInit (DMA2_Channel1);
DMA_StructInit (&DMA_init_struct);
DMA_init_struct.DMA_BufferSize = AUDIO_BUFFER_SIZE;
DMA_init_struct.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_init_struct.DMA_M2M = DMA_M2M_Disable;
DMA_INIT_STRUCT.DMA_MemoryBaseAddr =(u32) 和 Audio_Rx_Buffer [0];
DMA_init_struct.DMA_MemoryDataSize = DMA_MemoryData Size_Word;
DMA_init_struct.DMA_MemoryInc = Inc_Enable;
DMA_init_struct.DMA_Mode = DMA_DMA_DMA Mode_Circular;
DMA_init_struct.DMA_PeripheralBaseAddr =(u32)&SPI3 -> DR;
DMA_init_struct.DMA_PeripheralDataSize = DMA_PeripheralData Size_Word;
DMA_init_struct.DMA_PeripheralInc = DMA_Peripheral Inc_Disable;
DMA_INIT_STRUCT.DMA_PRIORITY = DMA_HIGH; Priority_Very
DMA_Init (DMA2_Channel1、&DMA_init_struct);
//初始化 SPI
SPI_I2S_DeInit (SPI3);
I2S_StructInit (&I2S_INIT_struct);
I2S_init_struct.I2S_AudioFreq = I2S_AudioFreq_96k;
I2S_init_struct.I2S_CPOL = I2S_CPOL_Low;
I2S_init_struct.I2S_DataFormat = I2S_DataFormat_24b;
I2S_init_struct.I2S_MCLKOutput = I2S_MCLK Output_Enable;
I2S_init_struct.I2S_Mode = I2S_Rx Mode_Master;
I2S_init_struct.I2S_Standard = I2S_Standard_MSB;
I2S_Init (SPI3、&I2S_init_struct);
//为 I2S 启用 DMA
SPI_I2S_DMACmd (SPI3、SPI_I2S_DMA Req_Rx、ENABLE);
//启用 I2S
I2S_Cmd (SPI3、ENABLE);
//启用 DMA 中断
DMA_ITConfig (DMA2_Channel1、DMA_IT_TC、ENABLE);
DMA_ITConfig (DMA2_Channel1、DMA_IT_HT、ENABLE);
DMA_ITConfig (DMA2_Channel1、DMA_IT_TE、ENABLE);
DMA2_Channel1、ENABLE);
}
uint32_t DATA_LOCATION = 0;
void DMA2_Channel1_IRQHandler (void)
{
//检查和处理传输完成 (TC)
if (DMA_GetITStatus (DMA2_IT_TC1)==设置)
{
DATA_LOCATION = DMA_GetCurrDataCounter (DMA2_Channel1);
//在完全传输 (TC) 完成时重新填充前半部分。
start_process (audio_half_size);
DM_ClearITPendingBit (DMA2_IT_TC1);
}
//检查和处理半转移 (HT)
if (DMA_GetITStatus (DMA2_IT_HT1)==设置)
{
DATA_LOCATION = DMA_GetCurrDataCounter (DMA2_Channel1);
//当半转接 (HT) 完成时、重新填充后半部分。
start_process (0);
DM_ClearITPendingBit (DMA2_IT_HT1);
}
//检查和清除传输错误 (TE)
IF (DMA_GetITStatus (DMA2_IT_TE1)==设置)
{
DM_ClearITPendingBit (DMA2_IT_TE1);
}
}
/*
setup.cpp
*/
#include “includes.h"</s>“
静态 NVIC_InitTypeDef NVIC_InitStructure;
void initSystem (void)
{
NVIC_PriorityGroupConfig (NVIC_PriorityGroup_2);
//NVIC_SetVectorTable (NVIC_VectTab_flash、0x200);
/*每个 0.1ms SysTick 计数结束事件*/
Sys Tick_Config (SystemCoreClock / 1000);
NVIC_InitStructure.NVIC_IRQChannel = SysTick_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd =启用;
NVIC_Init (&NVIC_InitStructure);
//NVIC_setpriority (SysTick _IRQn、0x0);
// PCLK2 = HCLK /2
RCC_PCLK1Config (RCC_HCLK_Div1);
RCC_PCLK2Config (RCC_HCLK_Div1);
//启动 GPIO APB 时钟
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA、ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOB、ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOC、ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOD、ENABLE);
//在 APB1 时钟中打开 DAC
// RCC_APB1PeriphClockCmd (RCC_APB1Periph_DAC、ENABLE);
//在 APB2 时钟中打开 ADC 1 和 3
RCC_APB2PeriphClockCmd(RCC_APB2PeriphClockCmd | RCC_APB2Periph_ADC3,启用);
//在 AHB 时钟中打开 DMA 1 和 2
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1 | RCC_AHBPeriph_DMA2,启用);
//// 在 APB2 时钟中开启 SPI3
RCC_APB1PeriphClockCmd (RCC_APB1Periph_SPI3、ENABLE);
//在 APB1 时钟中开启 SPI2
RCC_APB1PeriphClockCmd (RCC_APB1Periph_SPI2、ENABLE);
//在 APB2 时钟中打开 AFIO
RCC_APB2PeriphClockCmd (RCC_APB2Periph_AFIO、ENABLE);
led_pin_configuration();
button_configuration();
adc_start ();
SPIDAC_CONFIGURATION ();
SPIADC_Configuration ();
}
