请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC2640R2F 工具/软件:TI-RTOS
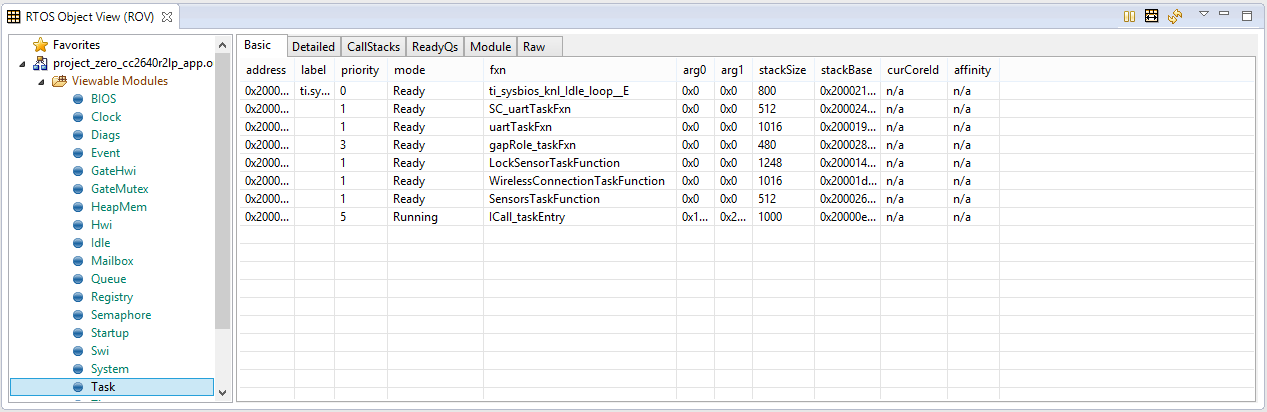
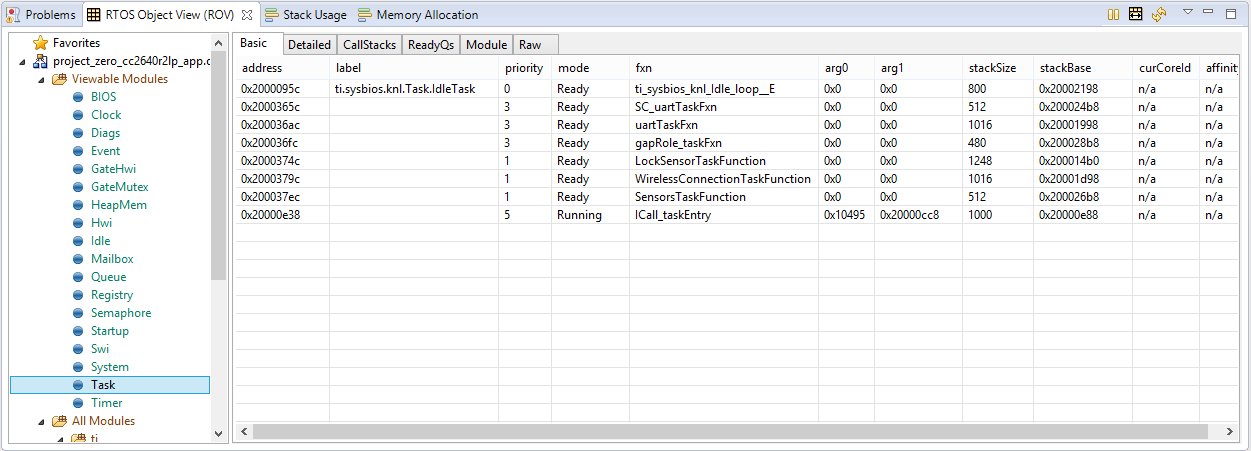
您好、您能帮您解决下一个问题。 该项目基于 project_zero_cc2640r2lp_app。 添加个人任务后、会出现以下情况:创建所有任务时不会出现错误、但当项目启动时、它们始终处于就绪状态(由点检查)、并且只有 iCall_taskEntry 任务处于运行状态:
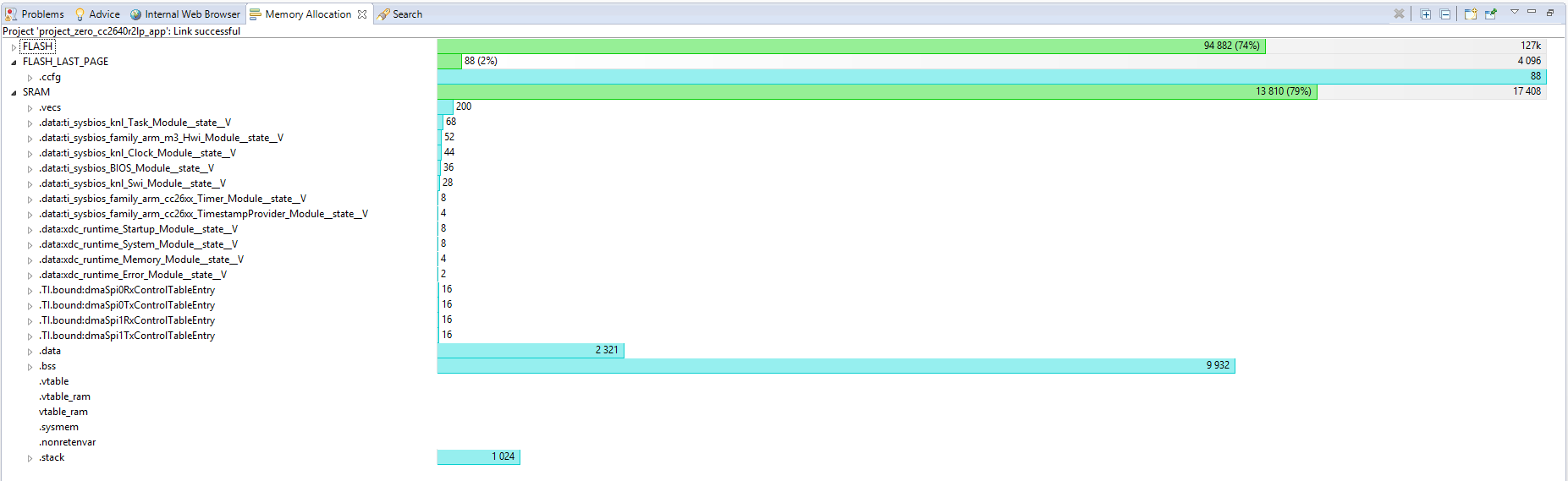
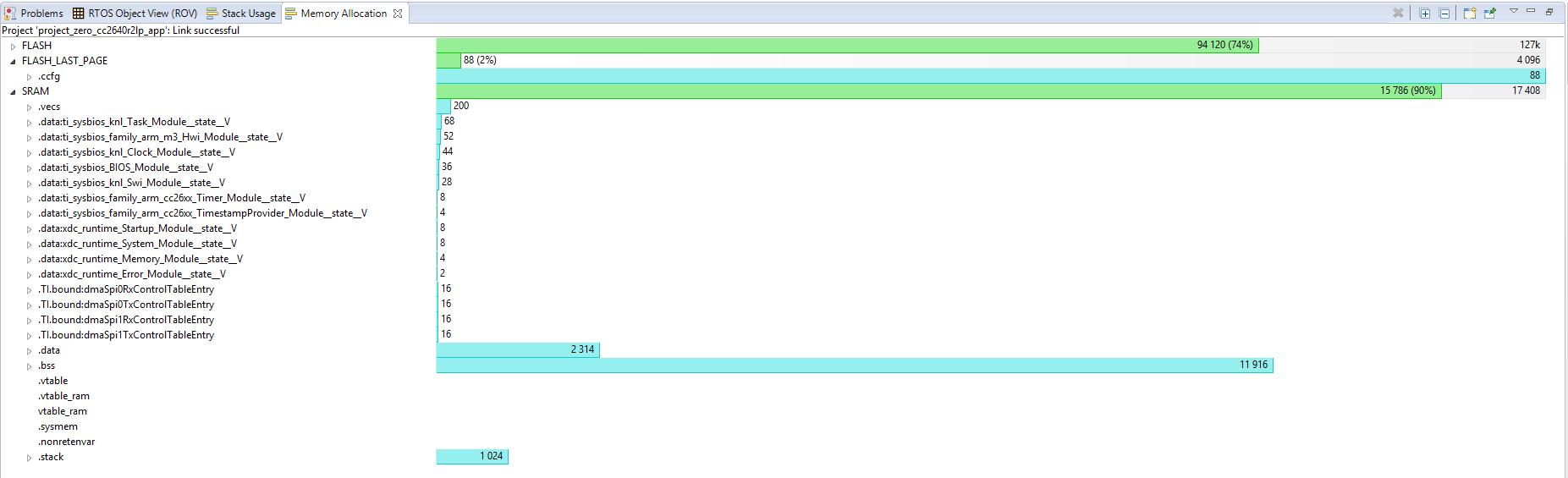
此外、存储器分配图:
这种情况的原因是什么?