请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 工具与软件:
我使用的是 F280025C 可以通过实现 DRV8329A EVM 逆变器板、并与配合使用 通用电机控制实验室(DMC 4级) 反馈的传递函数。
我需要配置一个未在通用电机控制工程中预配置的新电机。 我应该如何正确添加电机参数并调整基于霍尔传感器的 FOC 的控制算法?
此外、我还面临以下问题:
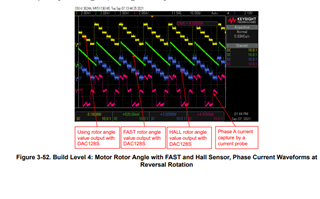
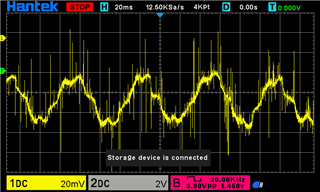
- 。 电流波形不是正弦波 ;相反,它类似于 A 六步控制波形 . 根据 用户指南的链接 中的电流应为正弦波 FOC 模式 . 如何解决此问题?
- 。 电机无法正常旋转 使用计算电角
HAL_CAL。 这可能是什么原因、如何解决?
如需获取有关正确配置基于霍尔传感器的 FOC 和调试这些问题的指导、欢迎获取该指南。
谢谢!