

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280039C-Q1 工具/软件:
尊敬的专家:
我向我的客户询问这个问题。
我的客户有两种方法来更新两个 PWM 的相移。
1.确定更新 TBPHS 的时间,如果他们想要修改相移值,他们将修改 TBPHS 的值
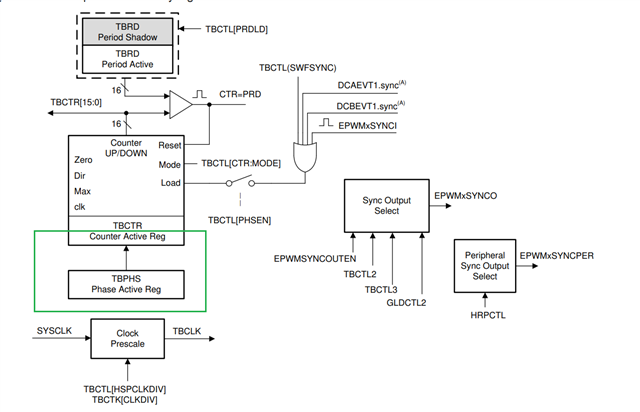
2.修正 TBPHS 的值,但修改更新时间。 它们使用 TBCTR=COMPC 来生成同步脉冲、在同步时间、它们将更改 COMPC 以更改同步时间。

现在、他们想检查:
1.更改相移值的两种方法之间是否有区别? 建议采用哪种方法?
2.是否有可能以这两种方式错过脉冲?
BRS
Shuqing
