请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F2800137 工具/软件:
TI 团队大家好、
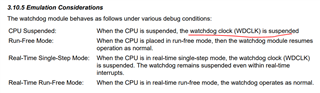
目前 我在看门狗计时器上工作。 我从 F2800137的驱动程序库示例中选择代码。 看门狗计时器溢出后 MCU 复位。 当我使用调试模式来执行代码时、在 看门狗计时器溢出时间->调试暂停。 我认为 MCU 应该复位。 仅使用 USB 电缆为 LaunchPad 上电并且未使用调试模式时、MCU 不会执行任何任务、例如切换引脚。 是在没有调试模式的情况下使用 LaunchPad 且 MCU 仅通过为电路板供电才能正常工作的任何方法。
此致、
Deepak