

Other Parts Discussed in Thread: LAUNCHXL-F28P55X, MOTORWARE, LVSERVOMTR
Thread 中讨论的其他器件: MOTORWARE、 LVSERVOMTR
工具/软件:
我将 DUAL_Axis_servo_drive 的代码 与 LAUNCHXL-F28P55X 和 BOOSTXL-3PhGaN 配合使用。
-------------------------------------------------------- BACKEMF ----------------------------------------------
我有一个电机 93Vrms/kRPM 但我需要 将其转换为 V/Hz 设置参数 M1_KB(BEMF 常数)。
-如果你的“V"在“在“V/Hz"是“是 Vrms,值是 93.3/1000*60=5.598
-如果“V/Hz"中“中的“V"用作“用作 Vpk、则该值为 93.3/1000*60*sqrt (2)= 7.917
这两种情况中的哪一种?
------------------------------------------------ ELECTRICAL FREQ--------------------------------------------------------------------
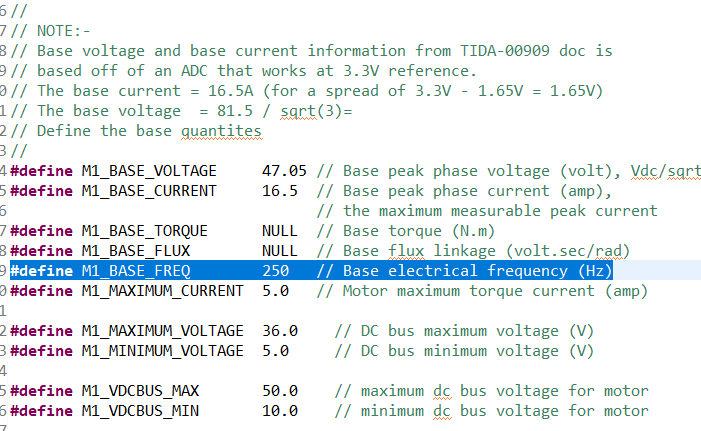
我应该更改 M1_BASE_FREQ 之间的区别吗?
这是什么意思?
我记得、在 motorware 中有: USER_MOTOR_FREQ_LOW、 USER_MOTOR_FREQ_HIGH、USER_MOTOR_FREQ_MAX 、USER_MOTOR_VOLT_MIN 和 USER_MOTOR_VOLT_MAX
这些参数必须设置为电机额定频率和电压的 10%和 100%–120%...我再也找不到这些参数了
------------------------------------------------ ENCODER LINES--------------------------------------------------------------------
正确的说法是:
M1_ENCODER_LINES =每转脉冲数 (PPR)=每革命计数/ 4
谢谢你。
