请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28379DThread 中讨论的其他器件:SysConfig、 C2000WARE
工具/软件:
您好:
是我,又是我。
我关闭了这个问题、因为解释非常清楚(非常感谢)
所以,我开始把它包括在我的项目中,但它不起作用。 为什么? 我的工程包括 CAN 功能。 因此、我加入了已解决的相同示例、但可以添加。
下面我来解释一下会发生什么情况:
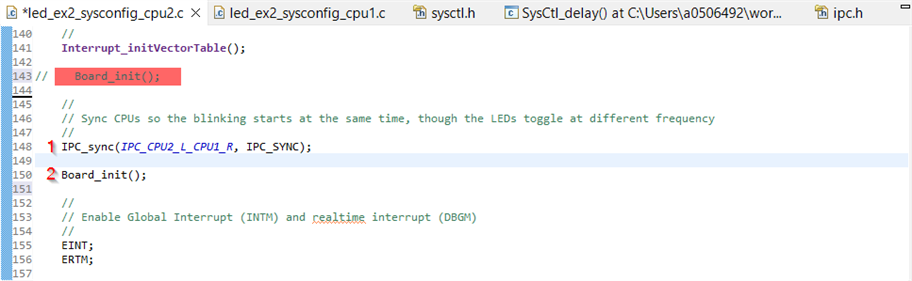
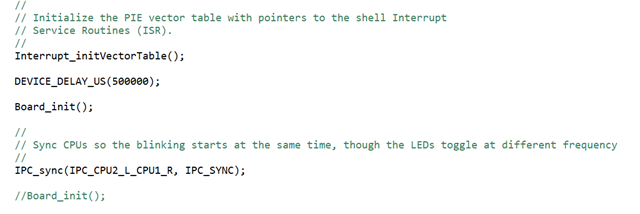
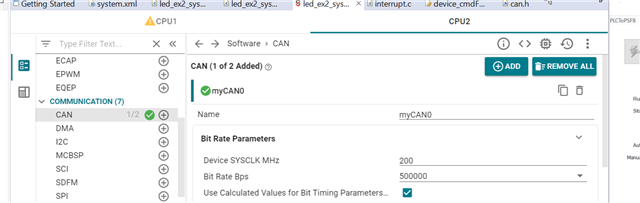
1) 该工程与之前相同、但我在 SysConfig 中添加了一个 CAN 外设。 我不会使用它。 我只希望工程在 board.c 中初始化此外设:
2) 我启动一个包含闪存配置的调试会话。 因此、当 CPU2 将复位时、不会擦除 RAM 中的代码、这对代码启动很有用
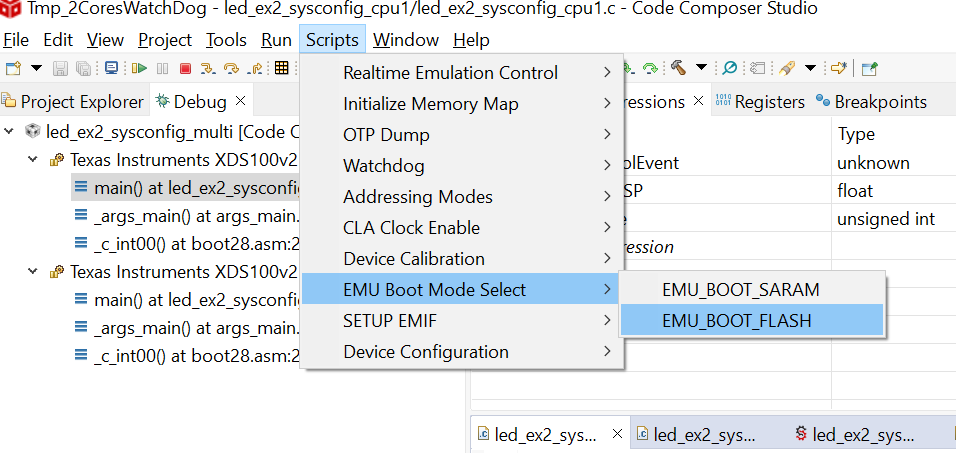
3) 在运行每个内核之前、我启动脚本 emu_boot_flash、并检查在地址 0xD00:
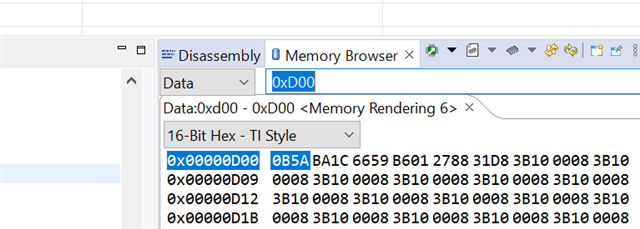
(CPU1)
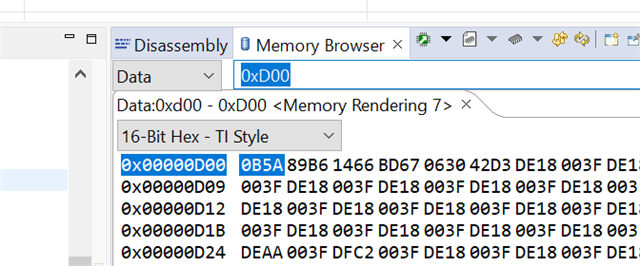
(CPU2)
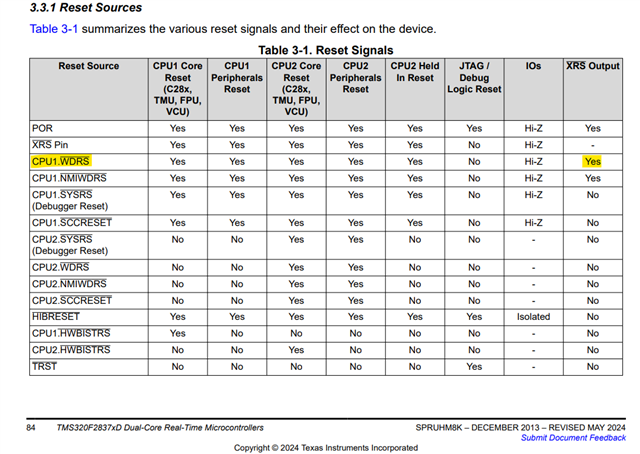
3) 设置变量 uint16_Freeze 时、CPU1 进入无限 while 循环、看门狗的 ISR 会请求 CPU1 和 CPU2 复位:
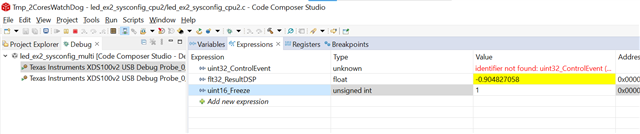
4) 我在调试会话中看不到任何错误消息,但我清楚地看到程序不再运行
如果我将 CPU2 设置为暂停状态、则可以看到程序在 CAN RAM init 函数中被阻止:
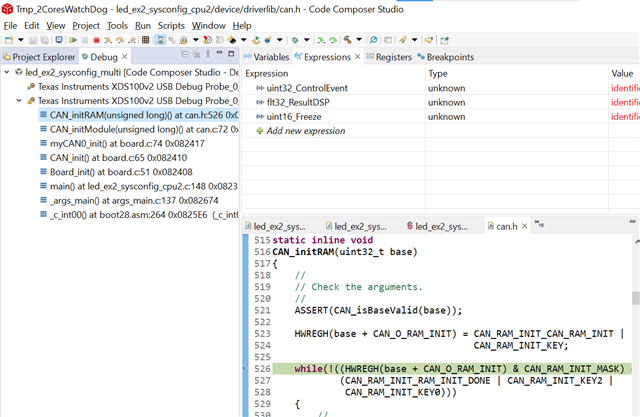
我想问题与 RAM 擦除有关。
有人能告诉我到底有什么错吗? 是否会在独立配置中发生? 如何在调试会话中测试看门狗功能?
谢谢你。