This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/microcontrollers/c2000-microcontrollers-group/c2000/f/c2000-microcontrollers-forum/1556270/launchxl-f28p55x-pwm-macro-and-pwm-hv-modules
工具/软件:
你(们)好
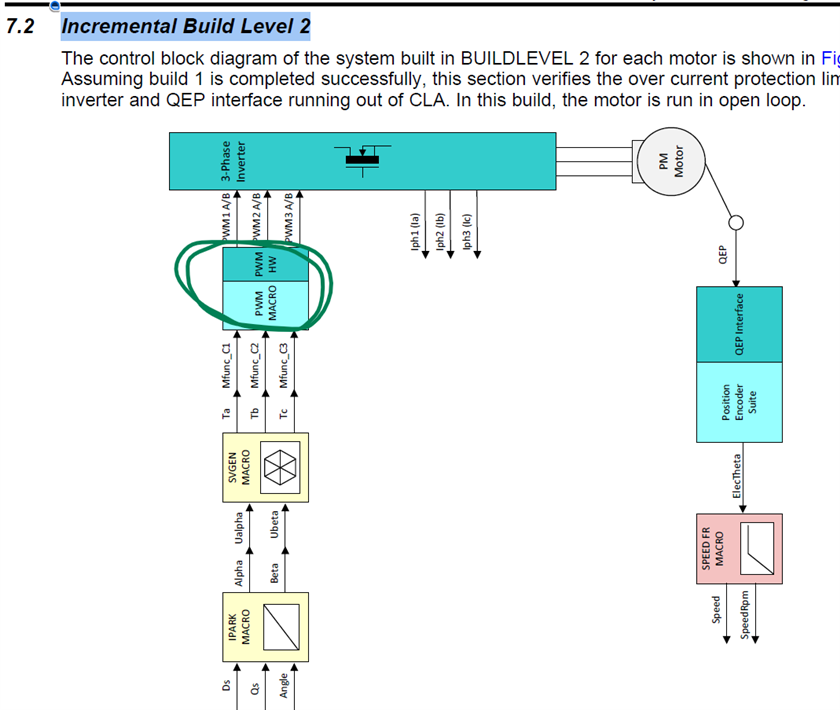
在文档或 dual_axis_servo_drive 代码中、哪里可以找到这两个模块的说明和实现?
谢谢
Luca,
我已经将其分配给我们的电机代码专家。 他很快就会回答你的问题。 感谢您的耐心。
此致、
Sumit
您好、
我看不到进一步说明的文档、只有 https://www.ti.com/lit/ug/spruip4/spruip4.pdf?ts = 1756308970299
以下是用于 SVGEN 和 PWM 比较器值设置的相关代码。 希望它澄清了它。
// // MACRO to :- // 1. do SVGEN // 2. do PWMupdates // FCL_SVGEN_PWM_PDATE_MACRO(); // FCL MACRO implementing SVGEN and PWM updates // used in both PI CONTROL and COMPLEX CONTROL // #define FCL_SVGEN_PWM_PDATE_MACRO() \ /* \ * ----------------------------------------------------------------------------\ * Call the space vector gen. macro \ * ----------------------------------------------------------------------------\ */ \ svgen2.Tb = (svgen2.Ubeta - svgen2.Ualpha) / 2; \ svgen2.Tc = svgen2.Tb - svgen2.Ubeta; \ \ svgen2.tmp2 = __fmax(__fmax(svgen2.Ualpha, \ svgen2.Tc), svgen2.Tb); \ svgen2.tmp2 += __fmin(__fmin(svgen2.Ualpha, \ svgen2.Tc), svgen2.Tb); \ \ svgen2.tmp1 = ((-svgen2.tmp2) / 2) + \ pMotor->FCL_params.carrierMid; \ \ /* \ * -----------------------------------------------------------------------------\ * Computed Duty and Write to CMPA register \ * -----------------------------------------------------------------------------\ */ \ FCL_PWM_UPDATE_STYLE_3(); #define FCL_PWM_UPDATE_STYLE_3() \ *(pMotor->pwmCompA) = (uint32_t)(svgen2.Tc + svgen2.tmp1); \ *(pMotor->pwmCompB) = (uint32_t)(svgen2.Ualpha + svgen2.tmp1); \ *(pMotor->pwmCompC) = (uint32_t)(svgen2.Tb + svgen2.tmp1);
Kevin
谢谢你。
但是您给我发送的代码是 SVGEN 还是 PWM 宏/PWM HV?
这是两者。 有关 PWM 宏、请参见 FCL_pwm_update_style_3 () 函数、该函数根据 SVGEN 输入计算和设置 PWM 比较值。 pwmCompA/B/C 指针已经在 FCL_initPWM () 函数中提前定义,所以它直接写入 EPWM CMPA 寄存器。
ptrMotor->pwmCompA = (uint32_t *)(basePhaseU + EPWM_O_CMPA); ptrMotor->pwmCompB = (uint32_t *)(basePhaseV + EPWM_O_CMPA); ptrMotor->pwmCompC = (uint32_t *)(basePhaseW + EPWM_O_CMPA);
我还要问一点。
dual_axis_servo_drive 中使用的所有模块的说明可通过下载 designdrive 找到?
因为我当前没有安装该板、尽管由于 CCS 已经足够、所以代码仍然有效
您可以导入 CCS 并参考 https://www.ti.com/tool/C2000WARE-MOTORCONTROL-SDK 安装中的以下工程目录。
C:\ti\c2000\C2000Control_SDK_5_04_00_00\solutions\boostxl_3phganinv\f28p55x Ware_Motor