

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: TMS320F2800157-Q1
尊敬的专家:
美好的一天! 我要找客户。
客户正在使用 LaunchPad 测试 F2800157、发现 ePWM 相移方向会影响移位时间。
测试说明如下:
EPWM3 零点会生成同步信号、EPWM1 和 EPWM2 具有基于 EPWM3 同步信号的相移。 EPWM1 相移值为 48、EPWM2 相移值为 40
测试 1:
EPWM1:相移 48、同步事件后倒计时
EPWM2:相移 40、同步事件后计数
EPWM1->EPWM3:418ns
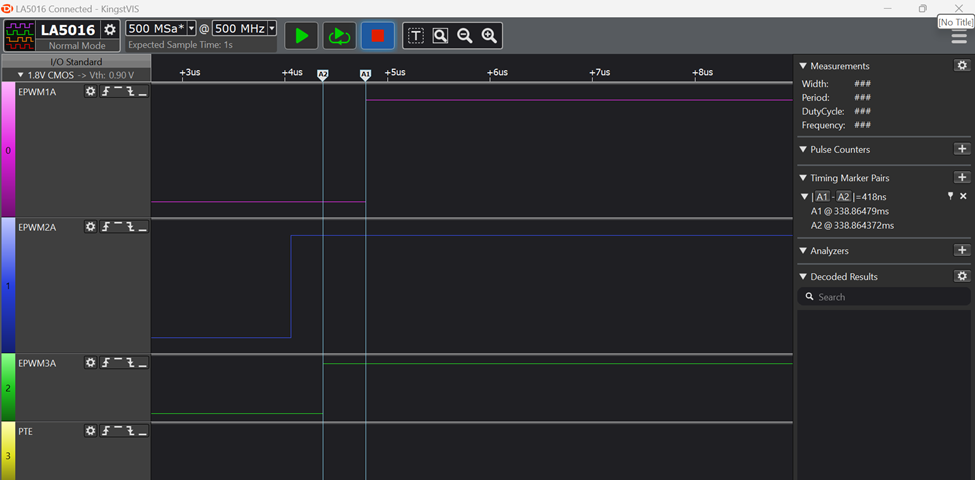
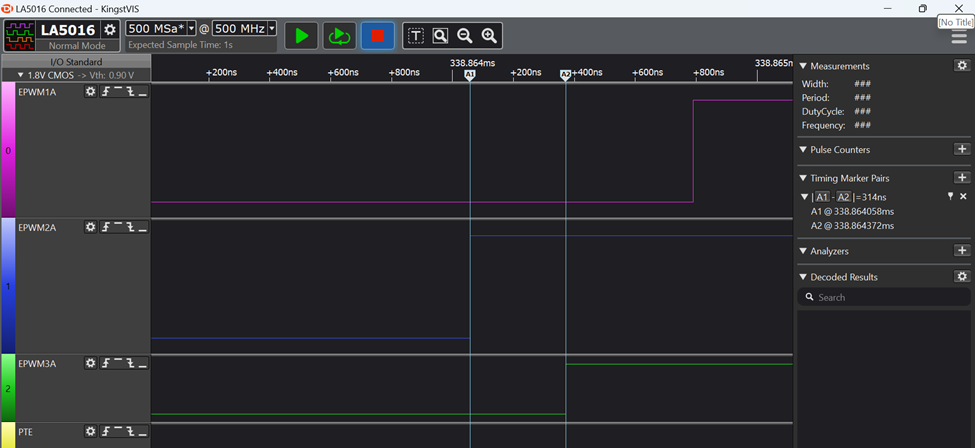
EPWM2->EPWM3:314
测试 2:
EPWM1:相移 48、同步事件后倒计时
EPWM2:相移 40、同步事件后倒计时
EPWM1->EPWM3:418ns
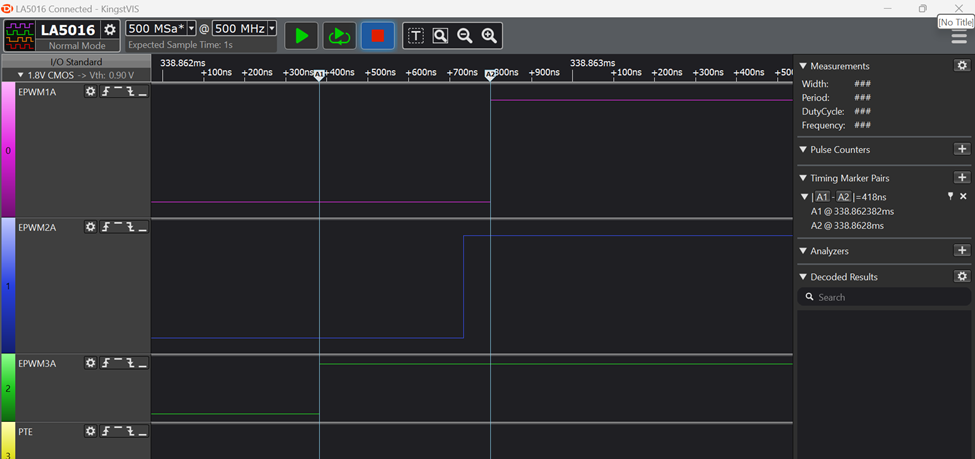
EPWM2->EPWM3:352ns
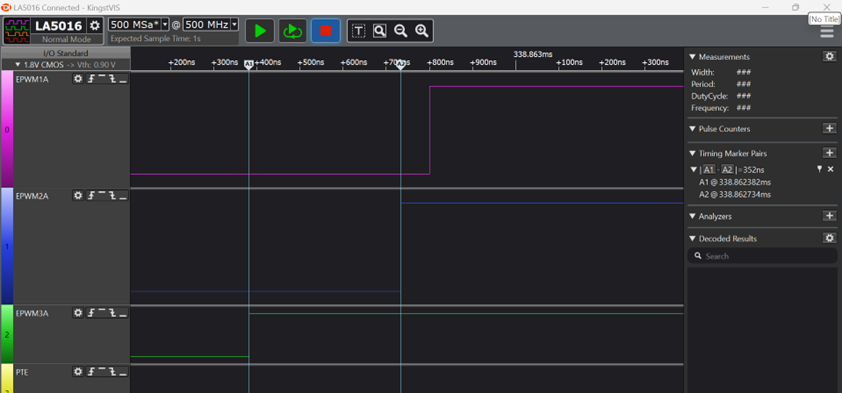
从上面的测试可以看出、当移位值相同但移位方向不同时、移位的结果会有所不同。 “Count Down Direction“将花费 4.5 个周期、然后是“Count Up Direction“。
客户有以下问题:
- 为什么相移方向会根据 EPWM2 结果导致时间差?
- 具有不同方向的相移时间计算公式如何?
我在这里附上测试代码。 您可以使用它进行测试。 2800157_PhaseShiftTest.zip
此致
Kita


