请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: TMS320F280049C
您好!
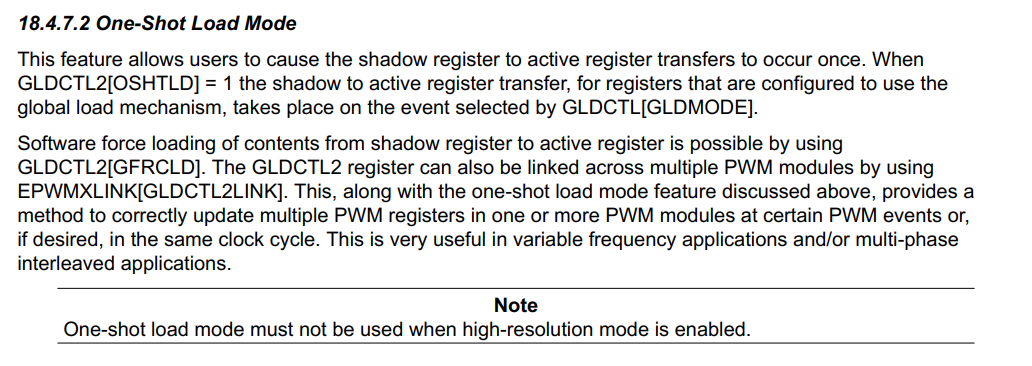
我们在使用 ePWM 全局加载时遇到问题、如“利用新 ePWM 的特性执行多相控制“中所述。我们可以使用一次性加载模式和全局加载模式、在控制 ISR 与 PWM 开关频率异步时、确保多个 PWM 模块中的所有寄存器在所选事件中都是最新的。 但在数据表中、我们在全局加载中提到、当启用高分辨率模式时、一次性加载模式将被禁用。 我认为、当开关频率是异步时、需要使用全局加载和单负载模式时、它是否会受到影响(修改后的寄存器包括占空比,高精度占空比,相位和高精度相位以及死区时间)? 如果有影响、当开关频率是异步的时、如何更新多个 ePWM 的寄存器?