Other Parts Discussed in Thread: C2000WARE
器件型号: LAUNCHXL-F28P65X
主题: C2000WARE 中讨论的其他器件
您好 TI 支持团队:
我正在撰写学士学位论文、需要帮助获取 TI C2000 EtherCAT 从站示例、以便与 Beckhoff PLC 主站通信并进入 OP 状态。 下面是我的设置、步骤和观察结果的详细信息。
目标:
使 TI C2000 F28P65x EtherCAT 从站与 PLC 主站通信并在 TwinCAT 3 中达到 OP 状态。
需要问题帮助:
我无法让 MCU 和 PLC 进行通信 — 当我将 TwinCAT 切换到 Config/Run 时、从站绝不会达到 OP。 扫描后、TwinCAT 检测到项 1 (EK1100)、但它不会自动找到 TI 从站。 我使用我生成的 ESI 手动添加 TI MCU 从站框并复制到 TwinCAT 目录中、然后通过 TI-slave-box > EtherCAT > Advanced Settings > ESC Access > E2‑PROM > Smart View 对 EEPROM 进行编程。 如果我删除了器件并重新扫描、则会显示 TI 从器件框、但仍然永远不会转换到 OP。 LaunchPad 上的 EtherCAT 链路/活动 LED (D11/D12) 保持熄灭。 即使电路板未连接到 PLC、TI 从站盒仍会在扫描后出现(可能是因为存在 ESI)、但不存在实际的链路或活动。 这就是我遇到的问题。
硬件:
MCU/板:TI C2000 F28P650 (LaunchPad;板载确切器件:F28P650DK9)
PLC:Beckhoff(两个标有 X000 和 X001 的以太网端口)
EtherCAT 耦合器:Beckhoff EK1100
电缆:标准以太网电缆;USB Type‑C 至 USB‑A、用于 CCS 调试/编程
软件和文件:
CCS:Code Composer Studio(请告知您是否需要确切的版本,我可以提供)
TwinCAT:TwinCAT 3(请告知您是否需要精确的构建;我可以提供)
SSC:SSC V5.12
TI 指南:EtherCAT_Suborder Device_Controller_Software_User_Guide
SSC 配置:f28p65x_ssc_config.xml
使用的示例:“3.2 Echoback CPU1 示例解决方案“
ESI:由 SSC 生成;放置在 C:/TwinCAT/3.1/Config/Io/EtherCAT 中
网络拓扑:
初始设置:
PLC X000 通过 USB‑转‑以太网适配器连接到工程 PC (TwinCAT)
PLC X001 直接连接到中的 TI LaunchPad EtherCAT
LaunchPad 通过 USB 连接到 PC 以进行 CCS 调试
更新了设置(根据 ETG 建议):
PLC X001→EK1100 X1 IN→EK1100 X2 OUT→中的 TI LaunchPad EtherCAT
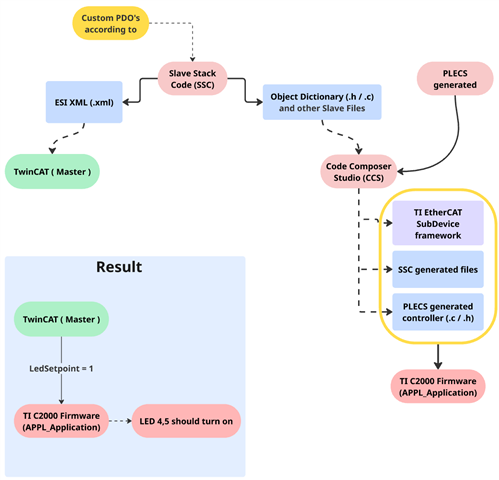
执行的步骤:
将 SSC 配置“f28p65x_ssc_config.xml"导“导入 SSC V5.12。
在自定义菜单中选择了“TI F28P65x CPU1 Echoback Solution“。
从 SSC 生成的从站源代码和 ESI。
将生成的工程导入 CCS 并进行编译、加载到 F28P650、然后运行应用。
将生成的 ESI 复制到 TwinCAT 目录 C:/TwinCAT/3.1/Config/Io/EtherCAT.中
在 TwinCAT 中:
已扫描设备。
最初看到的是“Device 3 (EtherCAT)(X001)(X001)“和“Term 1 EK1100“。
使用 ESI 手动添加了 TI 从动箱。
通过 TI‑的 SLAVE‑Box > EtherCAT > Advanced Settings > ESC Access > E2‑PROM > Smart View 写入 EEPROM。
已删除器件并重新扫描;在此过程之后将显示 TI 从器件框。
当前行为和观察结果:
当我将 TwinCAT 切换到 Config/Run 时、从器件绝不会达到 OP 状态。
TwinCAT 显示了 EK1100、并在手动步骤后显示了 TI 从站框、但状态不会进展到 OP。
电路板 LED D11/D12 (EtherCAT 端口/链路/活动 LED) 始终熄灭。
即使 LaunchPad 与 PLC 物理断开并重新扫描、也可以添加 TI 从动箱(可能是由于存在 ESI)、但实际没有链路活动。
PLC 与 TI 从器件之间不会建立通信。
已尝试故障排除:
已在 TwinCAT 中验证 ESI 放置和手动添加。
在 TwinCAT 中通过智能视图对 EEPROM 进行编程。
测试了这两种拓扑(直接 PLC→LaunchPad 和 PLC→EK1100→LaunchPad)。
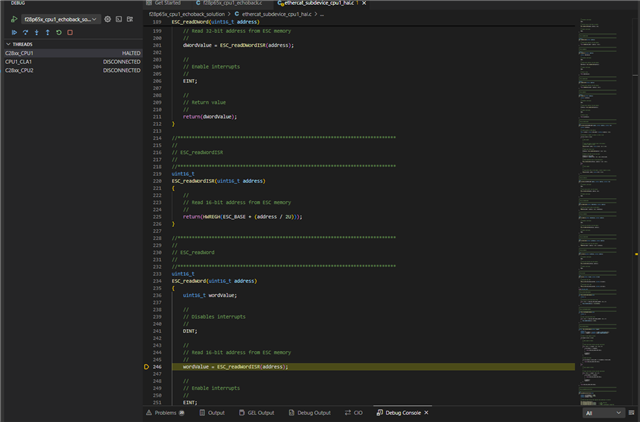
已确认应用程序已加载并在 CPU1 上运行。
已检查电缆并已使用 LaunchPad 上的 EtherCAT IN 端口。
问题:
F28P650 LaunchPad 上的“TI F28P65x CPU1 Echoback Solution“是否需要任何已知问题或额外步骤来到达 TwinCAT 3 中的 OP?
EEPROM 应该是从外部编程的、还是 TwinCAT 的 Smart View 对于此示例而言足够了?
我是否需要配置 F28P650 上的 PHY 或端口设置(例如配置引脚,内部 ESC 配置)才能建立链路? 这是否能解释 D11/D12 关闭的原因?
我是否应该检查特定的 AL/DL 寄存器值、以诊断为什么未达到 OP?
本示例是否需要 EK1100、或者直接 PLC→LaunchPad 是否应该正常工作? 需要注意的布线或拓扑限制? 








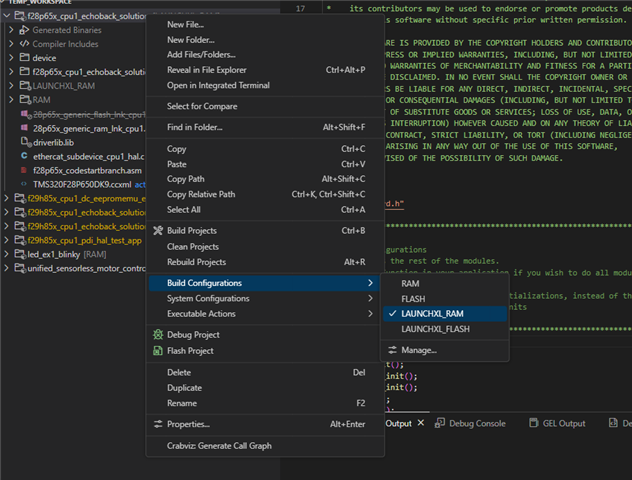





 、但在“Run"选项“选项卡中选择了 CCS 中的闪存工程
、但在“Run"选项“选项卡中选择了 CCS 中的闪存工程 
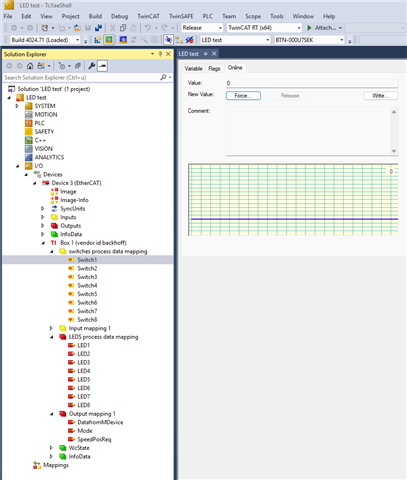
 通过点击此图标在运行模式下运行它时、现在不会出现任何错误、但通信无法正常工作。例如、如果我点击 LED 1 并将其值更改为“1",“,预期、预期行为应该是开关 1 的值也应该从“0"更“更改为“1",“,但、但这没有发生。
通过点击此图标在运行模式下运行它时、现在不会出现任何错误、但通信无法正常工作。例如、如果我点击 LED 1 并将其值更改为“1",“,预期、预期行为应该是开关 1 的值也应该从“0"更“更改为“1",“,但、但这没有发生。 

 、但在运行模式下运行时不起作用
、但在运行模式下运行时不起作用  。
。 


 但在运行模式下
但在运行模式下  回显示例无法正常工作。
回显示例无法正常工作。