请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F280025C “线程:测试”中讨论的其它部件
您好,专家,
我尝试在我的数字环路调节上设置 CAN 通信。 我使用峰值探头在 PC 上传输和查看帧(带有 PCAN-View)。 我想在 RX 上检测到帧时生成 CAN 中断,但它的工作效果不是很好。 加载程序时,我观察帧几个周期, 但什么也不观察,为什么?
你能解释一下我的错误在哪里吗? 你可以看到我的代码。
很难调试,因为当我使用 RAM 优化级别2进行编译时,它会编译,但在调试模式下,我从未通过中断,为什么 ? (有些呼叫不可能?) 当我尝试不进行优化编译时,它不进行编译时,我会收到以下消息:
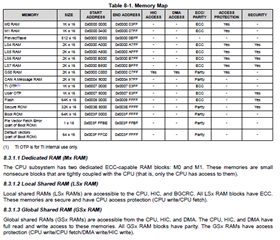
错误#10099-D:程序不能装入可用内存,或者该部分包含一个呼叫站点,该站点需要无法为该部分生成的蹦床。对“.text”大小为0x214cpage 0的部分进行对齐/阻塞定位失败。 可用内存范围:
RAMLS4567大小:0x2000未使用:0x2000最大孔:0x2000
RAMGS0大小:0x7f8未使用:0x7f8最大孔:0x7f8
我需要你们的帮助!
谢谢
达米恩
void main(void)
{
// Initialize device clock and peripherals
Device_init();
// Disable pin locks and enable internal pullups.
Device_initGPIO();
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
Interrupt_initModule();
// Initialize the PIE vector table with pointers to the shell Interrupt Service Routines (ISR).
Interrupt_initVectorTable();
can_init();
// Initialization timer
timer_cpu_init();
// Interrupt all of (us) 10ms
timer_cpu_config(CPUTIMER0_BASE, DEVICE_SYSCLK_FREQ, 10000);
// Disable sync and clock to PWM
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
Interrupt_register(INT_TIMER0, &isr_timer);
Interrupt_register(INT_CANA0, &isr_can);
CPUTimer_enableInterrupt(CPUTIMER0_BASE);
Interrupt_enable(INT_TIMER0);
CAN_enableInterrupt(CANA_BASE, CAN_INT_STATUS | CAN_INT_IE0 | CAN_INT_ERROR);
Interrupt_enable(INT_CANA0);
CAN_enableGlobalInterrupt(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
// Enable sync and clock to PWM
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
// Start CAN module operations
CAN_startModule(CANA_BASE);
// Start timer for interrupt CAN (to send frames)
CPUTimer_startTimer(CPUTIMER0_BASE);
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
EINT;
ERTM;
while(1)
{
}
}#include "device.h"
#include "can_module.h"
#include "epwm_module.h"
uint16_t rx_tx_parameters[SIZE];
void can_init(void)
{
EALLOW;
GPIO_setPinConfig(GPIO_33_CANA_RX);
GPIO_setPinConfig(GPIO_32_CANA_TX);
// To visualize timings
GPIO_setPinConfig(GPIO_40_GPIO40);
GPIO_setDirectionMode(40, GPIO_DIR_MODE_OUT);
GPIO_setPadConfig(40, GPIO_PIN_TYPE_STD);
EDIS;
CAN_initModule(CANA_BASE);
CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 250000, 20);
CAN_setupMessageObject(CANA_BASE, 1, 0x100, CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0, 0,8);
CAN_setupMessageObject(CANA_BASE, 2, 0x010, CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_RX, 0, CAN_MSG_OBJ_RX_INT_ENABLE,8);
}
void timer_cpu_init()
{
// Initialize timer period to maximum
CPUTimer_setPeriod(CPUTIMER0_BASE, 0xFFFFFFFF);
// Initialize pre-scale counter to divide by 1 (SYSCLKOUT)
CPUTimer_setPreScaler(CPUTIMER0_BASE, 0);
// Make sure timer is stopped
CPUTimer_stopTimer(CPUTIMER0_BASE);
// Reload all counter register with period value
CPUTimer_reloadTimerCounter(CPUTIMER0_BASE);
}
void timer_cpu_config(uint32_t cpuTimer, float freq, float period)
{
uint32_t temp;
// Initialize timer period:
temp = (uint32_t)(freq / 1000000 * period);
CPUTimer_setPeriod(cpuTimer, temp);
// Set pre-scale counter to divide by 1 (SYSCLKOUT):
CPUTimer_setPreScaler(cpuTimer, 0);
// Initializes timer control register. The timer is stopped, reloaded, free run disabled, and interrupt enabled. Additionally, the free and soft bits are set
CPUTimer_stopTimer(cpuTimer);
CPUTimer_reloadTimerCounter(cpuTimer);
CPUTimer_setEmulationMode(cpuTimer, CPUTIMER_EMULATIONMODE_STOPAFTERNEXTDECREMENT);
CPUTimer_enableInterrupt(cpuTimer);
}
__interrupt void isr_timer(void) // generate all of 10ms
{
GPIO_writePin(40, 1); // for debug
can_send_frames();
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
GPIO_writePin(40, 0);
}
void can_send_frames(void)
{
rx_tx_parameters[0] = epwm_dutycyle;
// Send CAN message data from message object 1
CAN_sendMessage(CANA_BASE, 1, 8, (uint16_t*) rx_tx_parameters);
}
__interrupt void isr_can(void)
{
GPIO_writePin(27, 1); // for debug
CAN_readMessage(CANA_BASE, 2, (uint16_t*) rx_tx_parameters);
epwm_dutycyle = rx_tx_parameters[0];
epwm_get_cmpa_from_dutycyle(EPWM1_BASE, epwm_dutycyle);
epwm_get_cmpa_from_dutycyle(EPWM2_BASE, epwm_dutycyle);
epwm_get_cmpa_from_dutycyle(EPWM3_BASE, epwm_dutycyle);
CAN_clearInterruptStatus(CANA_BASE, 2);
CAN_clearGlobalInterruptStatus(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
GPIO_writePin(27, 0);
}