

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F280049C “主题:MOTORWARE”中讨论的其它部件
您好,我有两个自定义主板,一个使用 F280054F,另一个使用 F280049C。
使用相同的电动机,相同的 PWM 频率为15KHz,我可以使用实验10a 到 F280054F 使用 US_MAX_VS_MAG_PU =0.66,最大速度/最大负载稳定。
但是,使用 Is08 by F280049C 时,我无法平稳运行 USER_MAX_VS_MAG_PU=0.66,电动机会以高相电流峰值振动很多。但电动机运行正常,但低于0.5。
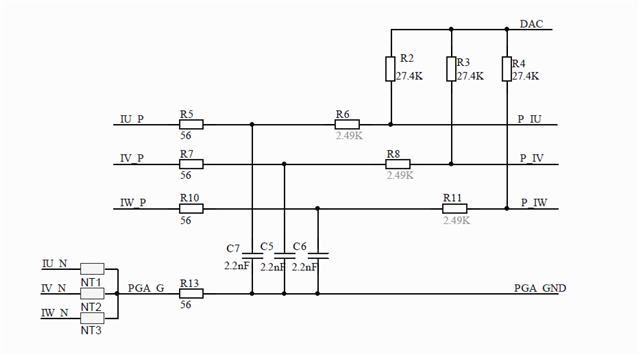
唯一的区别是,我使用带有 F280049C 的内置 PGA 进行电流感应,并使用带有 F280054F 的外置运算。
我知道这两个 MCU 的区别,因此我将 PI 段从 PU 更改为 SI,以确保这两个 proj/ECTS 在速度和电流环路上都具有相同的 PI 段。
当前环路带宽 :Float32_t BWC_rps = 0.25 / user_CTRL_Period_sec;(使用摩托车解决方案保持不变)
当前的采样问题是否存在? 外部操作是否适用于过度调制情况?
我们将感谢您的任何建议。
以下是使用低侧分流器0.002Ω Ω 的电流感应电路。
以下是 user.h 代码:
//############################################################################# // $TI Release: MotorControl SDK v3.01.00.00 $ // $Release Date: Mon Jan 11 11:23:03 CST 2021 $ // $Copyright: // Copyright (C) 2017-2018 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //############################################################################# #ifndef USER_H #define USER_H //! \file solutions/tmdshvmtrinspin/f28004x/drivers/user.h //! \brief Contains the user related definitions //! // ************************************************************************** // the includes // modules #include "userParams.h" //! //! //! \defgroup USER USER //! //@{ #ifdef __cplusplus extern "C" { #endif // ************************************************************************** // the defines //! \brief Defines the nominal DC bus voltage, V //! #define USER_NOMINAL_DC_BUS_VOLTAGE_V ((float32_t)(400.0)) //! \brief Defines the maximum voltage at the AD converter //! #define USER_ADC_FULL_SCALE_VOLTAGE_V ((float32_t)(592.58)) // Full scale voltage of AD converter, not the current voltage //! \brief Defines the maximum current at the AD converter //! #define USER_ADC_FULL_SCALE_CURRENT_A ((float32_t)(150.0)) // High Voltage motor control kit //! \brief Defines the analog voltage filter pole location, Hz //! #define USER_VOLTAGE_FILTER_POLE_Hz ((float32_t)(565.25)) /*#define USER_VOLTAGE_FILTER_POLE_Hz ((float32_t)(805.5))*/ //! \brief ADC current offsets for A, B, and C phases #define IA_OFFSET_A (-74.0117264) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A #define IB_OFFSET_A (-73.5474014) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A #define IC_OFFSET_A (-73.7967606) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A //! \brief ADC voltage offsets for A, B, and C phases #define VA_OFFSET_V (0.990514159) // ~=1.0 #define VB_OFFSET_V (0.986255884) // ~=1.0 #define VC_OFFSET_V (0.983381569) // ~=1.0 //! \brief Vbus used to calculate the voltage offsets A, B, and C #define VBUS_OFFSET_V (0.5*USER_ADC_FULL_SCALE_VOLTAGE_V) // =0.5*USER_NOMINAL_DC_BUS_VOLTAGE_V //! \brief Defines the maximum negative current to be applied in Id reference //! #define USER_MAX_NEGATIVE_ID_REF_CURRENT_A ((float32_t)(-2.0)) //! \brief Defines the number of pwm clock ticks per isr clock tick //! Note: Valid values are 1, 2 or 3 only #define USER_NUM_PWM_TICKS_PER_ISR_TICK (1) //! \brief Defines the number of ISR clock ticks per current controller clock tick //! #define USER_NUM_ISR_TICKS_PER_CURRENT_TICK (1) //! \brief Defines the number of ISR clock ticks per speed controller clock tick //! #define USER_NUM_ISR_TICKS_PER_SPEED_TICK (16) //! \brief Defines the number of current sensors //! #define USER_NUM_CURRENT_SENSORS (3) //! \brief Defines the number of voltage sensors //! #define USER_NUM_VOLTAGE_SENSORS (3) //! \brief Defines the system maximum input frequency, MHz //! #define USER_MAXIMUM_SCALE_FREQ_Hz ((float32_t)(1000.0)) //! \brief Defines the system clock frequency, MHz //! #define USER_SYSTEM_FREQ_MHz ((float32_t)(100.0)) //! \brief Defines the Pulse Width Modulation (PWM) frequency, kHz //! //#define USER_PWM_FREQ_kHz ((float32_t)(5.0)) //5KHz PWM frequency //#define USER_PWM_FREQ_kHz ((float32_t)(10.0)) //10KHz PWM frequency //#define USER_PWM_FREQ_kHz ((float32_t)(12.0)) //12KHz PWM frequency #define USER_PWM_FREQ_kHz ((float32_t)(16.0)) //15KHz PWM frequency //#define USER_PWM_FREQ_kHz ((float32_t)(20.0)) //20KHz PWM frequency //! \brief Defines the Pulse Width Modulation (PWM) period, usec //! #define USER_PWM_PERIOD_usec ((float32_t)1000.0/USER_PWM_FREQ_kHz) //! \brief Defines the Interrupt Service Routine (ISR) frequency, Hz //! #define USER_ISR_FREQ_Hz (USER_PWM_FREQ_kHz * (float32_t)1000.0 / (float32_t)USER_NUM_PWM_TICKS_PER_ISR_TICK) //! \brief Defines the Interrupt Service Routine (ISR) period, usec //! #define USER_ISR_PERIOD_usec (USER_PWM_PERIOD_usec * (float32_t)USER_NUM_PWM_TICKS_PER_ISR_TICK) #ifdef _VSF_EN_ //! \brief Defines the timer frequency for estimator, kHz //! #define USER_EST_FREQ_kHz ((float32_t)(20.0)) //! \brief Defines the timer frequency for estimator, Hz //! #define USER_EST_FREQ_Hz (USER_EST_FREQ_kHz * (float32_t)1000.0) //! \brief Defines the Interrupt Service Routine (ISR) period, usec //! #define USER_EST_PERIOD_usec ((float32_t)1000000.0/USER_EST_FREQ_Hz) //! \brief Defines the timer frequency for controller, Hz //! #define USER_CTRL_FREQ_Hz (USER_EST_FREQ_Hz) //! \brief Defines the controller execution period, usec //! #define USER_CTRL_PERIOD_usec (USER_EST_PERIOD_usec) //! \brief Defines the controller execution period, sec //! #define USER_CTRL_PERIOD_sec ((float32_t)USER_CTRL_PERIOD_usec/(float32_t)1000000.0) //! \brief Defines the timer frequency for trajectory, Hz //! #define USER_TRAJ_FREQ_Hz (USER_EST_FREQ_Hz) #else //! \brief Defines the timer frequency for estimator, kHz //! #define USER_EST_FREQ_Hz (USER_ISR_FREQ_Hz) //! \brief Defines the Interrupt Service Routine (ISR) period, usec //! #define USER_EST_PERIOD_usec (USER_ISR_PERIOD_usec) //! \brief Defines the timer frequency for controller, Hz //! #define USER_CTRL_FREQ_Hz (USER_ISR_FREQ_Hz) //! \brief Defines the controller execution period, usec //! #define USER_CTRL_PERIOD_usec (USER_ISR_PERIOD_usec) //! \brief Defines the controller execution period, sec //! #define USER_CTRL_PERIOD_sec ((float32_t)USER_CTRL_PERIOD_usec/(float32_t)1000000.0) //! \brief Defines the timer frequency for trajectory, Hz //! #define USER_TRAJ_FREQ_Hz (USER_ISR_FREQ_Hz) #endif // _VPF_EN_ //! \brief Defines the direct voltage (Vd) scale factor //! #define USER_VD_SF ((float32_t)(0.95)) //! \brief Defines the voltage scale factor for the system //! #define USER_VOLTAGE_SF (USER_ADC_FULL_SCALE_VOLTAGE_V / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096 #define USER_DCBUS_VOLTAGE_SF (USER_ADC_FULL_SCALE_DCBUS_VOLTAGE_V / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096 //! \brief Defines the current scale factor for the system //! #define USER_CURRENT_SF (USER_ADC_FULL_SCALE_CURRENT_A / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096 //! \brief Defines the pole location for the DC bus filter, rad/sec //! #define USER_DCBUS_POLE_rps ((float32_t)(100.0)) //! \brief Defines the pole location for the voltage and current offset estimation, rad/s //! #define USER_OFFSET_POLE_rps ((float32_t)(20.0)) //| \default value 100 rps //! \brief Defines the pole location for the speed control filter, rad/sec //! /*#define USER_SPEED_POLE_rps ((float32_t)(100.0))*/ #define USER_SPEED_POLE_rps ((float32_t)(100.0)) //! \brief Defines the analog voltage filter pole location, rad/s //! #define USER_VOLTAGE_FILTER_POLE_rps (MATH_TWO_PI * USER_VOLTAGE_FILTER_POLE_Hz) //! \brief Defines the maximum Vs magnitude in per units allowed //! This value sets the maximum magnitude for the output of the Id and //! Iq PI current controllers. The Id and Iq current controller outputs //! are Vd and Vq. The relationship between Vs, Vd, and Vq is: //! Vs = sqrt(Vd^2 + Vq^2). In this FOC controller, the Vd value is set //! equal to USER_MAX_VS_MAG*USER_VD_MAG_FACTOR. //! so the Vq value is set equal to sqrt(USER_MAX_VS_MAG^2 - Vd^2). //! //! Set USER_MAX_VS_MAG = 0.5 for a pure sinewave with a peak at //! SQRT(3)/2 = 86.6% duty cycle. No current reconstruction //! is needed for this scenario. //! //! Set USER_MAX_VS_MAG = 1/SQRT(3) = 0.5774 for a pure sinewave //! with a peak at 100% duty cycle. Current reconstruction //! will be needed for this scenario (Lab08). //! //! Set USER_MAX_VS_MAG = 2/3 = 0.6666 to create a trapezoidal //! voltage waveform. Current reconstruction will be needed //! for this scenario (Lab08). //! //! For space vector over-modulation, see lab08 for details on //! system requirements that will allow the SVM generator to //! go all the way to trapezoidal. //! //#define USER_MAX_VS_MAG_PU (0.66) //#define USER_MAX_VS_MAG_PU (0.57) #define USER_MAX_VS_MAG_PU (0.66) //! \brief Defines the reference Vs magnitude in per units allowed //! \ Set the value equal from 0.5 to 0.95 of the maximum Vs magnitude #define USER_VS_REF_MAG_PU ((float32_t)(0.95) * USER_MAX_VS_MAG_PU) //! \brief Defines the R/L excitation frequency, Hz //! #define USER_R_OVER_L_EXC_FREQ_Hz ((float32_t)(300.0)) //! \brief Defines the R/L Kp scale factor, pu //! Kp used during R/L is USER_R_OVER_L_KP_SF * USER_NOMINAL_DC_BUS_VOLTAGE_V / USER_MOTOR_MAX_CURRENT_A; //! #define USER_R_OVER_L_KP_SF ((float32_t)(0.02)) //! \brief Defines maximum acceleration for the estimation speed profiles, Hz/sec //! #define USER_MAX_ACCEL_Hzps ((float32_t)(2.0)) //! \brief Defines the IdRated delta to use during estimation //! #define USER_IDRATED_DELTA_A ((float32_t)(0.0001)) //! \brief Defines the forced angle frequency, Hz //! #define USER_FORCE_ANGLE_FREQ_Hz ((float32_t)(3.0)) //! \brief Defines the fraction of IdRated to use during inductance estimation //! #define USER_IDRATED_FRACTION_FOR_L_IDENT ((float32_t)(0.5)) //! \brief Defines the fraction of SpeedMax to use during inductance estimation //! #define USER_SPEEDMAX_FRACTION_FOR_L_IDENT ((float32_t)(1.0)) //! \brief Defines the Power Warp gain for computing Id reference //! If motor parameters are known, set this gain to: //! USER_PW_GAIN = SQRT(1.0 + USER_MOTOR_Rr_Ohm / USER_MOTOR_Rs_Ohm) //! #define USER_PW_GAIN ((float32_t)(1.0)) //! \brief Defines the scale factor for the flux estimation //! the default value is 1.0f, change the value between 0.1f and 1.25f //! #define USER_EST_FLUX_HF_SF ((float32_t)(0.125)) //! \brief Defines the scale factor for the frequency estimation //! the default value is 1.0f, change the value between 0.5f and 1.5f //! #define USER_EST_FREQ_HF_SF ((float32_t)(1.5f)) //! \brief Defines the scale factor for the bemf estimation //! the default value is 1.0f, change the value between 0.50f and 1.25f //! #define USER_EST_BEMF_HF_SF ((float32_t)(1.25f)) //! \brief A flag to bypass motor identification (1/0 : true/false) //! #define USER_BYPASS_MOTOR_ID (1) // No motor parameters identification //#define USER_BYPASS_MOTOR_ID (0) // Do motor parameters identification #define USER_ENABLE_MOTOR_ID 0 #define USER_DISABLE_MOTOR_ID 1 /* //! brief Define the Kp gain for Field Weakening Control #define USER_FWC_KP 0.05 //! brief Define the Ki gain for Field Weakening Control #define USER_FWC_KI 0.0002 */ /* //! brief Define the Kp gain for Field Weakening Control #define USER_FWC_KP 0.25 //! brief Define the Ki gain for Field Weakening Control #define USER_FWC_KI 0.001 */ /* //! brief Define the Kp gain for Field Weakening Control #define USER_FWC_KP 0.035 //! brief Define the Ki gain for Field Weakening Control #define USER_FWC_KI 0.00075 */ //! brief Define the Kp gain for Field Weakening Control #define USER_FWC_KP 0.05 //! brief Define the Ki gain for Field Weakening Control #define USER_FWC_KI 0.0002 //! \brief Defines the number of isr ticks per field weakening clock tick //! #define FW_NUM_ISR_TICKS_PER_CTRL_TICK (16) //! brief Define the maximum current vector angle for Field Weakening Control #define USER_FWC_MAX_ANGLE (float32_t)(-75.0) // degree #define USER_FWC_MAX_ANGLE_RAD USER_FWC_MAX_ANGLE*MATH_PI/((float32_t)(180.0)) // rad //! brief Define the minimum current vector angle for Field Weakening Control #define USER_FWC_MIN_ANGLE (float32_t)(-30.0) // degree #define USER_FWC_MIN_ANGLE_RAD USER_FWC_MIN_ANGLE*MATH_PI/((float32_t)(180.0)) // rad //! brief Define the maximum current vector angle for Field Weakening Control #define USER_FWC_MIN_CURRENT (float32_t)(-0.7 *USER_MOTOR_MAX_CURRENT_A) #define USER_FWC_MAX_CURRENT 0 //============================================================================================ // Motor defines //************** Motor Parameters ************** // PMSM motors #define Estun_EMJ_04APB22_A 101 #define Estun_EMJ_04APB22_B 102 #define Marathon_N56PNRA10102 103 #define Anaheim_BLWS235D_160V 104 #define Teknic_M2310PLN04K 121 #define Anaheim_BLY172S_24V 122 #define Anaheim_BLY341S_48V 123 #define Anaheim_BLY341S_24V 124 #define Traxxas_Velineon_380 131 #define Traxxas_Velineon_3500 132 #define Pacific_Scientific 133 #define Regal_Beloit_5SME39DL0756 134 #define AutoRadiatorFan 135 #define philips_respirator 141 #define tekin_redline_4600KV 142 // ACIM motors #define Marathon_5K33GN2A 201 #define Marathon_56H17T2011A 202 #define Dayton_3N352C 203 #define my_motor_1 301 //#define USER_MOTOR Estun_EMJ_04APB22_A //#define USER_MOTOR Estun_EMJ_04APB22_B //#define USER_MOTOR Marathon_N56PNRA10102 //#define USER_MOTOR Anaheim_BLWS235D_160V //#define USER_MOTOR Teknic_M2310PLN04K //#define USER_MOTOR Anaheim_BLY172S_24V //#define USER_MOTOR Anaheim_BLY341S_48V //#define USER_MOTOR Anaheim_BLY341S_24V //#define USER_MOTOR Traxxas_Velineon_380 //#define USER_MOTOR Traxxas_Velineon_3500 //#define USER_MOTOR Pacific_Scientific //#define USER_MOTOR Regal_Beloit_5SME39DL0756 //#define USER_MOTOR AutoRadiatorFan //#define USER_MOTOR philips_respirator //#define USER_MOTOR tekin_redline_4600KV //#define USER_MOTOR Marathon_5K33GN2A //#define USER_MOTOR Marathon_56H17T2011A //#define USER_MOTOR Dayton_3N352C #define USER_MOTOR my_motor_1 //#define USER_MOTOR my_motor_2 #if (USER_MOTOR == Estun_EMJ_04APB22_A) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (0.0) #define USER_MOTOR_Rs_Ohm (2.26793718) #define USER_MOTOR_Ls_d_H (0.00808008015) #define USER_MOTOR_Ls_q_H (0.00808008015) #define USER_MOTOR_RATED_FLUX_VpHz (0.387036026) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (3.82) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR_INERTIA_Kgm2 (3.10002e-05) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (30.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR == my_motor_1) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.169607401) #define USER_MOTOR_Ls_d_H (0.00079099607) #define USER_MOTOR_Ls_q_H (0.00079099607) #define USER_MOTOR_RATED_FLUX_VpHz (0.309579641) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (5.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.5) #define USER_MOTOR_MAX_CURRENT_A (42.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (1000) #define USER_MOTOR_INERTIA_Kgm2 (7.06154e-06) #define USER_MOTOR_RATED_VOLTAGE_V (300.0) #define USER_MOTOR_RATED_SPEED_KRPM (8.6) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (800.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (300.0) // Volt #define USER_MOTOR_RATED_VOLTAGE_V (400.0) #define USER_MOTOR_RATED_SPEED_KRPM (11.0) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (800.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (800.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (500.0) // Volt #elif (USER_MOTOR == Estun_EMJ_04APB22_B) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (0.0) // HV Kit with external OPA #define USER_MOTOR_Rs_Ohm (2.98774099) #define USER_MOTOR_Ls_d_H (0.008926632) #define USER_MOTOR_Ls_q_H (0.008926632) #define USER_MOTOR_RATED_FLUX_VpHz (0.445965141) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (3.82) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR_INERTIA_Kgm2 (3.10002e-05) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR == Marathon_N56PNRA10102) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (3) #define USER_MOTOR_Rr_Ohm (0.0) // HV Kit with external OPA #define USER_MOTOR_Rs_Ohm (2.17462158) #define USER_MOTOR_Ls_H (0.0269199051) #define USER_MOTOR_Ls_d_H (0.0218) #define USER_MOTOR_Ls_q_H (0.0505) #define USER_MOTOR_RATED_FLUX_VpHz (2.65306973) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (3.0) #define USER_MOTOR_IND_EST_CURRENT_A (-2.0) #define USER_MOTOR_MAX_CURRENT_A (6.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR_INERTIA_Kgm2 (2.6981376e-03) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR == Anaheim_BLWS235D_160V) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (5.3205986) #define USER_MOTOR_Ls_d_H (0.0221263766) #define USER_MOTOR_Ls_q_H (0.0221263766) #define USER_MOTOR_RATED_FLUX_VpHz (0.557901621) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.5) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_INERTIA_Kgm2 (3.99683e-05) // 0.00566 oz-in-sec2 #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (30.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR == Teknic_M2310PLN04K) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.381334811) #define USER_MOTOR_Ls_d_H (0.000169791776) #define USER_MOTOR_Ls_q_H (0.000169791776) #define USER_MOTOR_RATED_FLUX_VpHz (0.0398557819) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (2.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.5) #define USER_MOTOR_MAX_CURRENT_A (6.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR_NUM_ENC_SLOTS (1000) #define USER_MOTOR_INERTIA_Kgm2 (7.06154e-06) #define USER_MOTOR_RATED_VOLTAGE_V (24.0) #define USER_MOTOR_RATED_SPEED_KRPM (3.0) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (600.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (24.0) // Volt #elif (USER_MOTOR == Anaheim_BLY172S_24V) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.4) #define USER_MOTOR_Ls_d_H (0.0007190173) #define USER_MOTOR_Ls_q_H (0.0007190173) #define USER_MOTOR_RATED_FLUX_VpHz (0.0327013217) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.5) #define USER_MOTOR_IND_EST_CURRENT_A (-1.5) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_INERTIA_Kgm2 (3.96154e-06) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (24.0) // Volt #elif (USER_MOTOR == Anaheim_BLY341S_48V) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.463800967) #define USER_MOTOR_Ls_d_H (0.00114538975) #define USER_MOTOR_Ls_q_H (0.00114538975) #define USER_MOTOR_RATED_FLUX_VpHz (0.0978558362) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (2.5) #define USER_MOTOR_IND_EST_CURRENT_A (-2.0) #define USER_MOTOR_MAX_CURRENT_A (20.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (24.0) // Volt #elif (USER_MOTOR == Anaheim_BLY341S_24V) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.4110007) #define USER_MOTOR_Ls_d_H (0.0007092811) #define USER_MOTOR_Ls_q_H (0.0007092811) #define USER_MOTOR_RATED_FLUX_VpHz (0.03279636) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.5) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (10.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (24.0) // Volt #elif (USER_MOTOR == Traxxas_Velineon_380) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (1) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (TBD) #define USER_MOTOR_Ls_d_H (TBD) #define USER_MOTOR_Ls_q_H (TBD) #define USER_MOTOR_RATED_FLUX_VpHz (TBD) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (4.0) #define USER_MOTOR_IND_EST_CURRENT_A (-0.5) #define USER_MOTOR_MAX_CURRENT_A (10.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == Traxxas_Velineon_3500) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (1) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.01822988) #define USER_MOTOR_Ls_d_H (8.322238e-06) #define USER_MOTOR_Ls_q_H (8.322238e-06) #define USER_MOTOR_RATED_FLUX_VpHz (0.010249538) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (2.0) #define USER_MOTOR_IND_EST_CURRENT_A (-2.0) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == Pacific_Scientific) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (0.0) #define USER_MOTOR_Rs_Ohm (0.9428042) #define USER_MOTOR_Ls_d_H (0.002196057) #define USER_MOTOR_Ls_q_H (0.002196057) #define USER_MOTOR_RATED_FLUX_VpHz (0.3481677) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (8.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == Regal_Beloit_5SME39DL0756) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (3) #define USER_MOTOR_Rr_Ohm (0.0) #define USER_MOTOR_Rs_Ohm (4.581007) #define USER_MOTOR_Ls_d_H (0.03727356) #define USER_MOTOR_Ls_q_H (0.03727356) #define USER_MOTOR_RATED_FLUX_VpHz (0.6589699) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (2.6) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == AutoRadiatorFan) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (0.0) #define USER_MOTOR_Rs_Ohm (0.0) #define USER_MOTOR_Ls_d_H (0.0) #define USER_MOTOR_Ls_q_H (0.0) #define USER_MOTOR_RATED_FLUX_VpHz (TBD) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (10.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (50.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == philips_respirator) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (1) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.1690236) #define USER_MOTOR_Ls_d_H (0.0001557156) #define USER_MOTOR_Ls_q_H (0.0001557156) #define USER_MOTOR_RATED_FLUX_VpHz (0.011538831) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == tekin_redline_4600KV) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (0.0181193) #define USER_MOTOR_Ls_d_H (8.180002e-06) #define USER_MOTOR_Ls_q_H (8.180002e-06) #define USER_MOTOR_RATED_FLUX_VpHz (0.0041173688) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (3.0) #define USER_MOTOR_IND_EST_CURRENT_A (-3.0) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (60.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == Marathon_5K33GN2A) #define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (5.508003) #define USER_MOTOR_Rs_Ohm (10.71121) #define USER_MOTOR_Ls_d_H (0.05296588) #define USER_MOTOR_Ls_q_H (0.05296588) #define USER_MOTOR_RATED_FLUX_VpHz (0.8165*220.0/60.0) #define USER_MOTOR_MAGNETIZING_CURRENT_A (1.378) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (NULL) #define USER_MOTOR_MAX_CURRENT_A (3.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_INERTIA_Kgm2 (2.12002e-05) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR == Marathon_56H17T2011A) #define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (5.159403) #define USER_MOTOR_Rs_Ohm (7.924815) #define USER_MOTOR_Ls_d_H (0.03904648) #define USER_MOTOR_Ls_q_H (0.03904648) #define USER_MOTOR_RATED_FLUX_VpHz (0.8165*220.0/60.0) #define USER_MOTOR_MAGNETIZING_CURRENT_A (0.9941965) #define USER_MOTOR_RES_EST_CURRENT_A (0.5) #define USER_MOTOR_IND_EST_CURRENT_A (NULL) #define USER_MOTOR_MAX_CURRENT_A (2.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == Dayton_3N352C) #define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (2.428799) #define USER_MOTOR_Rs_Ohm (2.863202) #define USER_MOTOR_Ls_d_H (0.02391323) #define USER_MOTOR_Ls_q_H (0.02391323) #define USER_MOTOR_RATED_FLUX_VpHz (0.8165*230.0/60.0) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (NULL) #define USER_MOTOR_MAX_CURRENT_A (3.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #elif (USER_MOTOR == my_motor_2) #define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR_NUM_POLE_PAIRS (2) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (NULL) #define USER_MOTOR_Ls_d_H (NULL) #define USER_MOTOR_Ls_q_H (NULL) #define USER_MOTOR_RATED_FLUX_VpHz (0.8165*230.0/60.0) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (0.5) #define USER_MOTOR_IND_EST_CURRENT_A (NULL) #define USER_MOTOR_MAX_CURRENT_A (5.0) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0) // Number of lines on the motor's quadrature encoder #define USER_MOTOR_NUM_ENC_SLOTS (1000) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz #define USER_MOTOR_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR_VOLT_MAX_V (24.0) // Volt #else #error No motor type specified #endif //! \brief Defines the maximum current slope for Id trajectory //! #define USER_MAX_CURRENT_DELTA_A (USER_MOTOR_RES_EST_CURRENT_A / USER_ISR_FREQ_Hz) //! \brief Defines the maximum current slope for Id trajectory during power warp mode //! #define USER_MAX_CURRENT_DELTA_PW_A (0.3 * USER_MOTOR_RES_EST_CURRENT_A / USER_ISR_FREQ_Hz) #ifndef USER_MOTOR #error Motor type is not defined in user.h #endif #ifndef USER_MOTOR_TYPE #error The motor type is not defined in user.h #endif #ifndef USER_MOTOR_NUM_POLE_PAIRS #error Number of motor pole pairs is not defined in user.h #endif #ifndef USER_MOTOR_Rr_Ohm #error The rotor resistance is not defined in user.h #endif #ifndef USER_MOTOR_Rs_Ohm #error The stator resistance is not defined in user.h #endif #ifndef USER_MOTOR_Ls_d_H #error The direct stator inductance is not defined in user.h #endif #ifndef USER_MOTOR_Ls_q_H #error The quadrature stator inductance is not defined in user.h #endif #ifndef USER_MOTOR_RATED_FLUX_VpHz #error The rated flux of motor is not defined in user.h #endif #ifndef USER_MOTOR_MAGNETIZING_CURRENT_A #error The magnetizing current is not defined in user.h #endif #ifndef USER_MOTOR_RES_EST_CURRENT_A #error The resistance estimation current is not defined in user.h #endif #ifndef USER_MOTOR_IND_EST_CURRENT_A #error The inductance estimation current is not defined in user.h #endif #ifndef USER_MOTOR_MAX_CURRENT_A #error The maximum current is not defined in user.h #endif #ifndef USER_MOTOR_FLUX_EXC_FREQ_Hz #error The flux excitation frequency is not defined in user.h #endif #if ((USER_NUM_CURRENT_SENSORS < 2) || (USER_NUM_CURRENT_SENSORS > 3)) #error The number of current sensors must be 2 or 3 #endif #if (USER_NUM_VOLTAGE_SENSORS != 3) #error The number of voltage sensors must be 3 #endif // ************************************************************************** // the typedefs // ************************************************************************** // the globals // ************************************************************************** // the functions //! \brief Sets the user parameter values //! \param[in] pUserParams The pointer to the user param structure extern void USER_setParams(USER_Params *pUserParams); //! \brief Sets the private user parameter values //! \param[in] pUserParams The pointer to the user param structure extern void USER_setParams_priv(USER_Params *pUserParams); //! \brief Sets the private user parameter values //! \param[in] pUserParams The pointer to the user param structure extern void cla_USER_setParams_priv(USER_Params *pUserParams); #ifdef __cplusplus } #endif // extern "C" //@} // ingroup #endif // end of USER_H definition
