请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28388D “线程: C2000WARE”中讨论的其它部件
您好,
希望你们做得好。
我们正在使用 TMS320F28388D 控制卡并尝试读取 SPI 错误行。
以下是 SPI 配置。
//mySPI0初始化
SPI_enableFIFO (mySPI0_base);
SPI_setConfig (mySPI0_base,device_LSPCLK_FREQ,SPI_PROT_POL1PHA0,
SPI_MODE_MASTER,1000000,8);
SPI_disableLoopback (mySPI0_base);
SPI_enableTalk (mySPI0_base);
SPI_disableInterrupt (mySPI0_base,SPI_INT_TXFF);
SPI_setEmulationMode (mySPI0_base,SPI_emulation _fule_run);
SPI_enableModule(mySPI0_base);
下面是我们用于读取 SPI miso 的 API。
对于(i=0;i<5;i++)
{
SPI_writeDataNonBlocking (mySPI0_base,地址[i]);
read_data[i]= SPI_readDataNonBlocking (mySPI0_base);
}
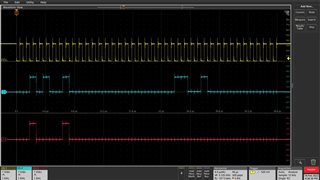
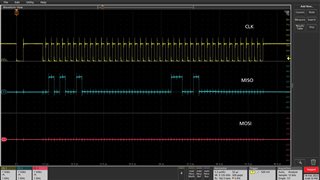
但是,当我们交叉检查示波器之间 SPI 误线接收到的数据与通过 SPI_readDataNonBlocking 获得的数据不匹配。
SPI 配置或 SPI 错误行读数方面是否有任何问题?
谢谢
纳维亚·安娜·王子