

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8312-C2-套件 你好!
我们似乎对电机的感应式 BLDC 控制存在问题,该电机按如下方式(根据 pdf 指南)连接到 DRV8312-C2-Kit。
DSP 向 BLDC 驱动器输出的 PWM 似乎关闭了60度(周期的六分之一)。
当电机通过另一个电机旋转时,如果每个霍尔传感器的状态都显示最大线路 BEMF,则会产生以下正确的切换表。
|
相位间的正确传导 |
霍尔传感器 |
||
|
蓝色 |
绿色 |
白色 |
|
|
黑色->红色 |
0 |
0 |
1. |
|
黑->黄色 |
0 |
1. |
1. |
|
红->黄 |
0 |
1. |
0 |
|
Red->黑色 |
1. |
1. |
0 |
|
黄色->黑色 |
1. |
0 |
0 |
|
黄色->红色 |
1. |
0 |
1. |
表1.
当电机通过具有传感器控制的 BLDC 控制的开发板旋转时,它会产生以下切换表,该表从正确的表中偏移60度或由单个霍尔传感器状态移动。
|
阶段之间的实际传导 |
霍尔传感器 |
||
|
蓝色 |
绿色 |
白色 |
|
|
黑色->红色 |
1. |
0 |
1. |
|
黑->黄色 |
0 |
0 |
1. |
|
红->黄 |
0 |
1. |
1. |
|
Red->黑色 |
0 |
1. |
0 |
|
黄色->黑色 |
1. |
1. |
0 |
|
黄色->红色 |
1. |
0 |
0 |
表2.
当电机通过无传感器 BLDC 模式下的开发旋转且观察到霍尔传感器时,它们符合表1,进一步确认它是正确的切换顺序。
这可以通过感应式 BLDC 模式下的相位电流波形进一步观察(图 1)与在无传感器 BLDC 操作中观察到的正确波形相比不正确(图 2)。
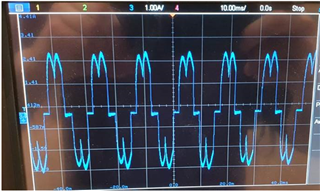
图 1–含传感器的 BLDC 控制相位电流波形(不正确)。
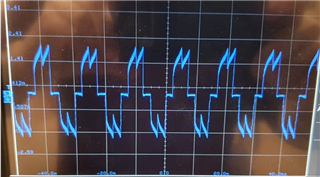
图 2–无传感器 BLDC 控制相位电流波形(正确)。
这似乎是一个代码问题,如果可能,我们希望收到一个允许正确操作的程序文件,我们可以将其刷新到控制器上。
此致,
