请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28069M 线程中讨论的其它部件:TMDSHVMTRINSPIN, TMS320F28069, 测试, TMS320F28069F, MOTORWARE
大家好,团队
客户提出的问题可能需要您的帮助:
TMS320F28069主芯片使用 TMDSHVMTRINSPIN 套件执行 lab01b (验证硬件完整性)实验。
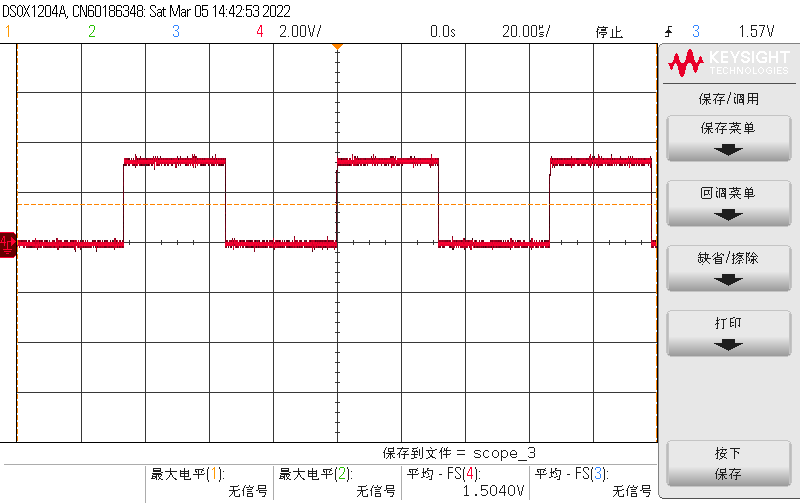
使用示波器测试4个 PWMDAC 信号的输出波形,而无需根据官方文档设置连接电机(使用自己的电机)。 但仅是马-安纳波的角度和信号,而不是 PhaseA 电流信号。 使用示波器观察6个 PWM 输出信号,只有低 PWM1L,PWM2L 和 PWM3L 具有输出信号,PWM1H,PWM2H 和 PWM3H 没有输出信号。 客户希望知道如何解决此问题。
谢谢,
樱桃