

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8301-69M-Kit 主题中讨论的其他部件:MOTORWARE
嘿,
我一直在试用本周推出的新款69M套件,并已通过MotorWare安装实验室对套件进行测试。
我正在学习该平台,以使其适应我们的电动滑板电机控制器,它将仅在扭矩模式下使用,并且可能仅在正转速下使用(至少在开始时)。 这就提出了如何在所有4个象限的速度/扭矩控制上操作的几个问题(下面所附的4个象限的图片)。 实验4没有完全回答我的问题,因为它不支持再生,并且根据指令扭矩的标志执行自动速度反转。
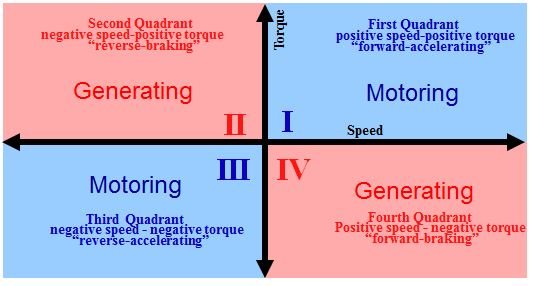
因此,如果我已经了解如何在每个独立象限上操作,则应该是:
速度参考信号使用(CTRL_setSpd_ref_Krpm)控制,扭矩参考使用(CTRL_setIq_ref_PU)
1.正速度参考,正指令IQ
2.负速度参考,正指令IQ
3.负速度参考,负指令IQ
4.正转速参考,负指令IQ
