

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:MOTORWARE 工具/软件:Starterware
您好,
问题1:我在 st_obj.vel.id.cfg.Sensorless中发现马达执行不同的轨迹为TRUE或FALSE。
正确:
错误: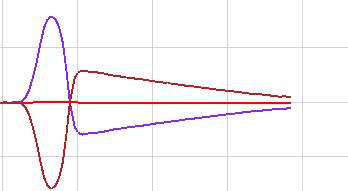 (蓝线表示实际速度)
(蓝线表示实际速度)
如果我只将编码器结果用于速度反馈, 我是否可以通过不同 轨迹获得类似结果?
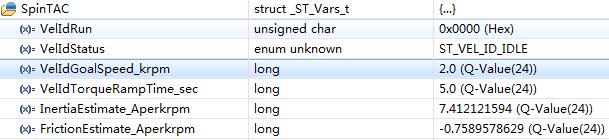
问题2:我设置 了VelIdGoalSpeed_Krpm =1,但在 执行惯性标识的过程中,电机刚刚达到790RPM。
类似的情况, VelIdGoalSpeed_Krpm =2,电动机刚刚达到1550-RPM。
造成这种现象的原因是什么?
我确认我的感觉反馈是正确的,马达在无负载的情况下运行良好,方法是lab12b。
问题3:我 得到了一个负结果。如果我使用这个值, 电动机在负载下运行会更差。
所以我猜我得到的结果是错误的。
我使用感应反馈(ST_runPosConv Result)和 FOC PI控制, 电动机可以满载运输,并且可以稳定运行。
不过,我想利用惯性控制系统,以取得更好的效果。
