主题中讨论的其他部件:DRV8323, MOTORWARE, DRV8305, DRV8301
早上好,
我们正在尝试使用2.8027万F控制器和DRV8323驱动器来识别高速,低电感电机(~50krpm,~32uH)的电机电感和通量,但在测试中发现的电感错误。 请注意,我们在几年前成功地在另一个项目中使用了汽车器具,因此我对不同的项目和控制方法有一些了解。
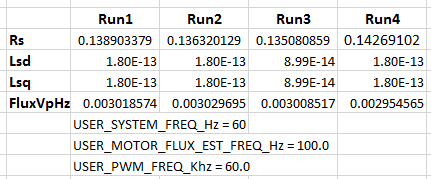
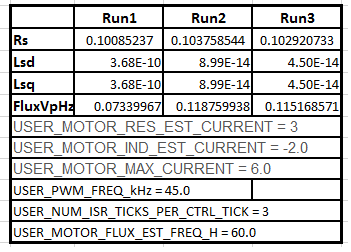
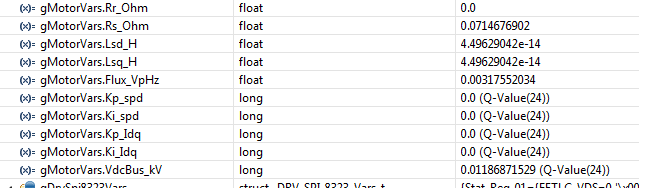
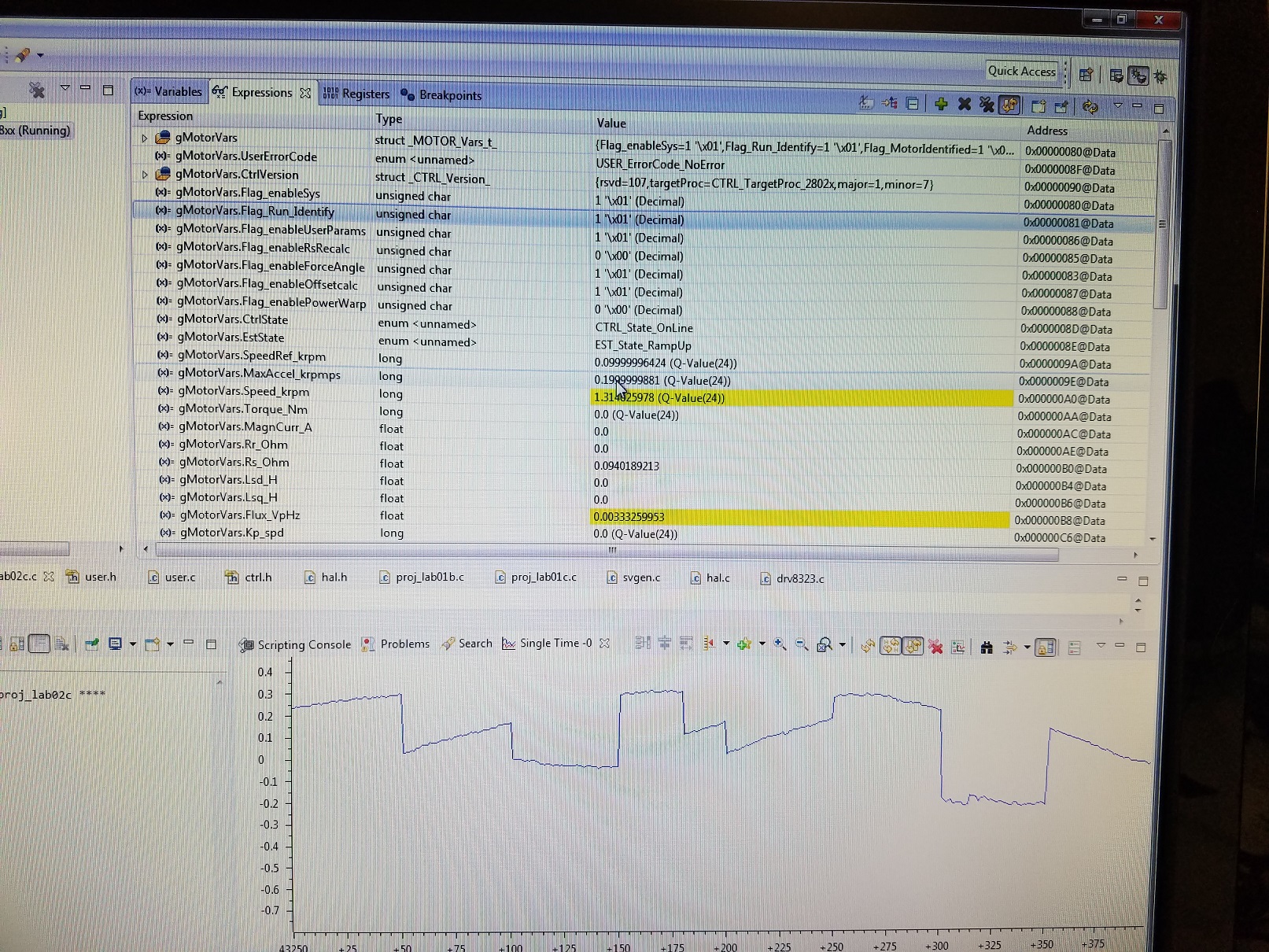
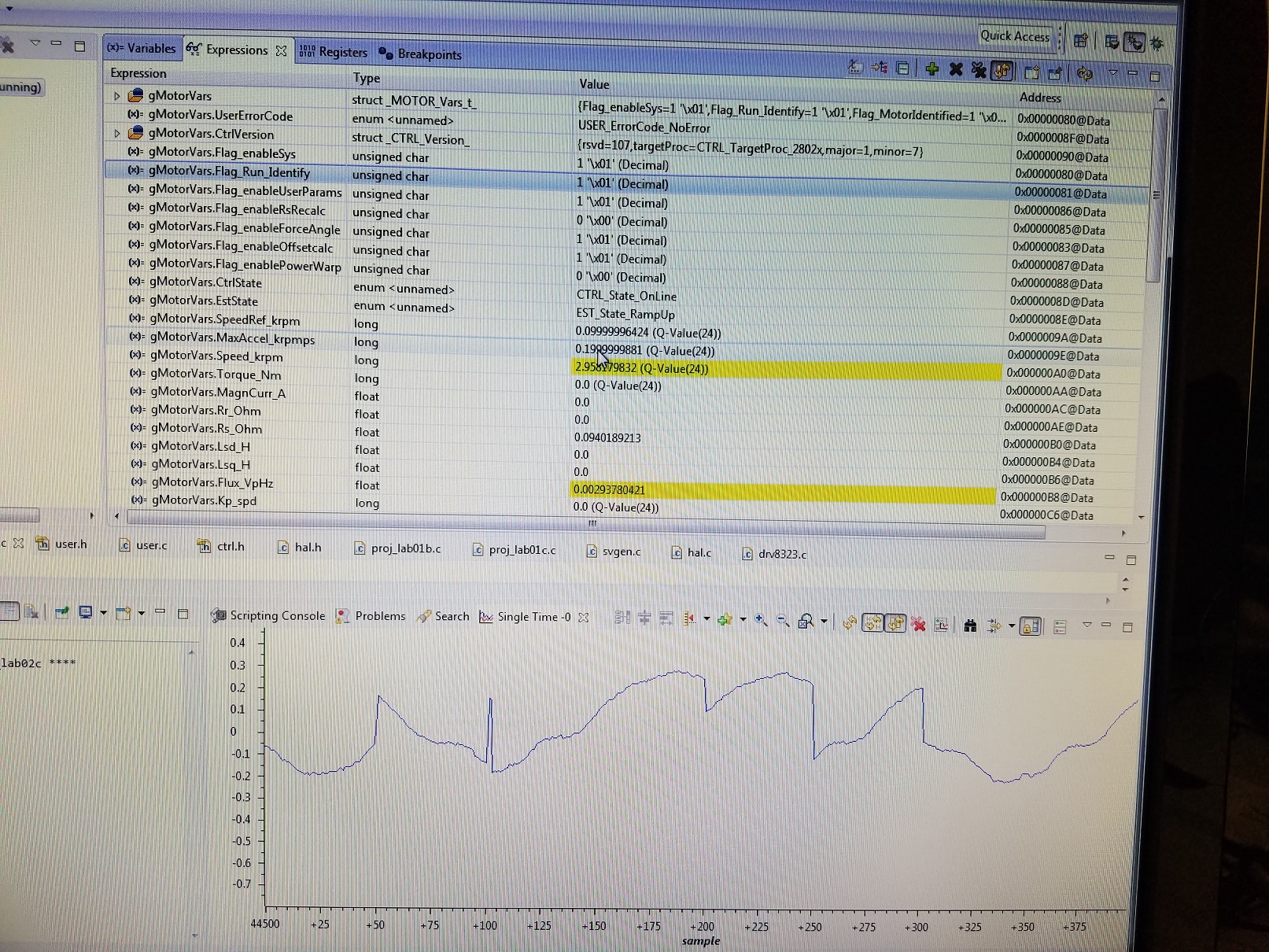
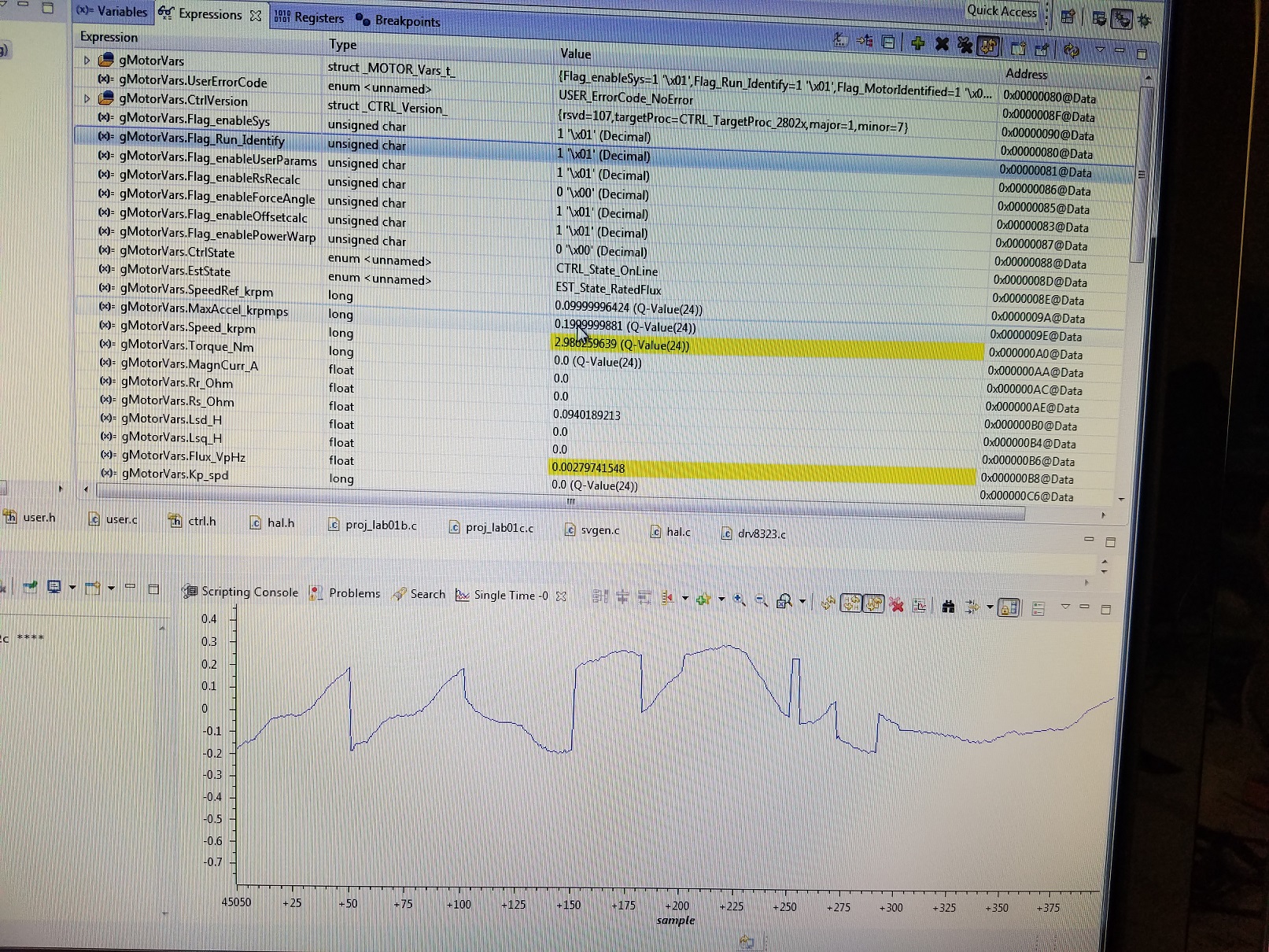
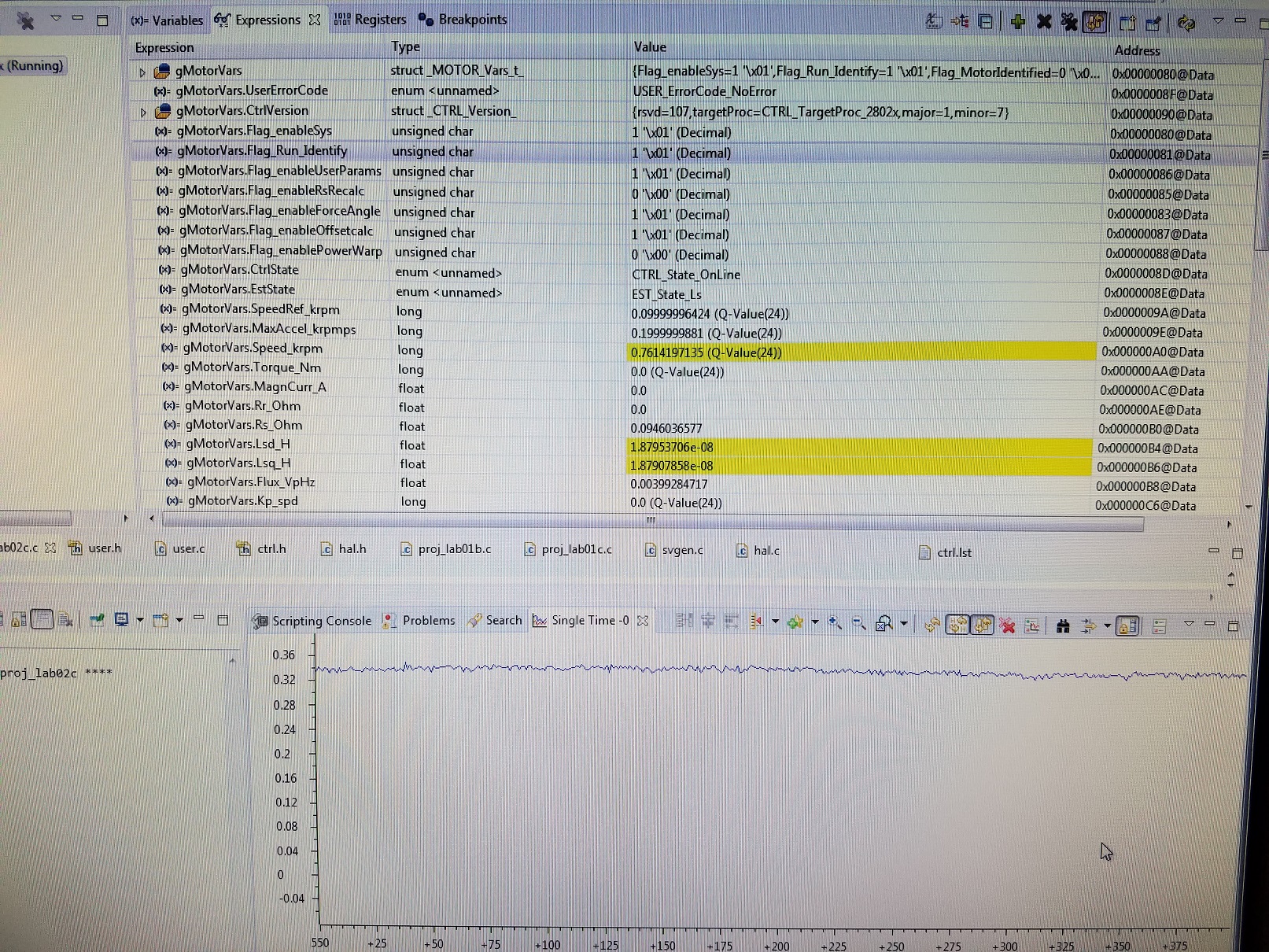
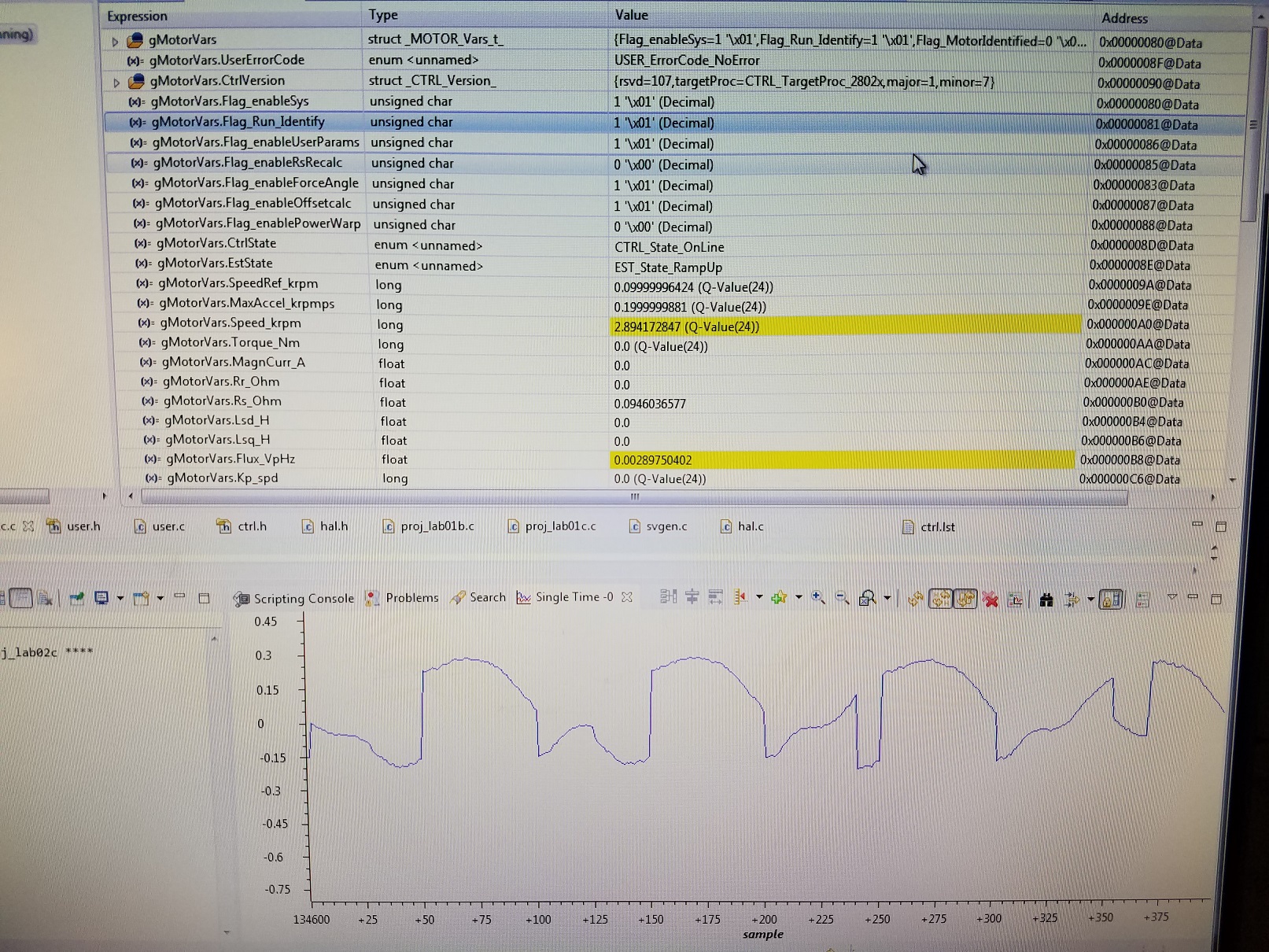
电阻的大小顺序似乎是正确的,但lab2c项目正在确定1.e-7到1e-13的电动机电感,我知道这对于我的电动机来说太低了。 为了安全起见,我在user.h中将电机的最大电流设置为3A,即使电机的电流额定值大大高于此限值。 这是否会影响结果? 我曾尝试将 user_motor_fluance_EST_FREQ_Hz提高 到400Hz,但未能始终确定正确的电感。 这是我的数字
|
RS |
0.0.55392083亿 |
0.0.56029175亿 |
0.0.70272058亿 |
|
LSD |
3.25E-07 |
1.35E-07 |
3.60E-13. |
|
LSQ |
3.25E-07 |
1.35E-07 |
3.60E-13. |
|
FluxVpHz |
0.2.1851万 |
0.22.1093万 |
0.0.02165522亿 |
以下是我的user.h文件中的关键值
#define user_IQ_Full-Scale_FREQ_Hz (1666.7)// Hz =(RPM *极)/120
#define user_IQ_full标度电压V (14.4)
#define user_ADC_FULL比例电压_V (22.538)
#define user_voltage_SF ((float_t)((USER_ADC_FULL Scale Voltage_V)/(USER_IQ) FULL Scale Voltage_V))
#define user_IQ_full比例当前A (20.625)
#define user_ADC_FULL比例当前A (41.25)//
#define user_current_SF (((float_t)((user_adc_full) scale_current_A)/(user_IQ) FULL scale_current_A))
#define user_NUM_CURRENT_SENSORS (3)// 3在全速范围内实现最佳性能的首选设置,允许100 % 占空比
#define user_NUM_VOLATE_SENSORS (3)// 3必需
#define user_system_FREQ_MHz (90.0)
#define user_PWM_FREQ_kHz (45.0)// 30.0 示例,8.0 - 30.0 KHz (典型);极低电感,高速电机可能需要45-80 KHz
#define user_NUM_PWM_TICS_PER_ISR_TICK (3)
#define user_NUM_ISR_TICS_PER_CTRL_TICK (1)// 2示例,控制器时钟频率(CTRL)以PWM / 2运行;例如30 KHz PWM,15 KHz控制
#define user_NUM_CTRL_TICS_PEARS_PRIVE_TICK (1)// 1典型的正向FOC电流控制器(IQ/ID/IPark/SVPWM)以与CTRL相同的速率运行。
#define user_NUM_CTRL_TICS_PRIVE_per EST _Tick (1)// 1典型快速估算器以与CTRL相同的速率运行;
#define user_NUM_CTRL_TICS_Per_speed_tick (5)// 15典型匹配PWM,例如:15kHz PWM,控制器和电流回路,1KHz速度回路
#define user_NUM_CTRL_TICS_PER_TRAJ_TICK (5)// 15典型匹配PWM,例如:10kHz控制器和电流回路,1KHz速度回路,1 KHz轨迹
#define user_R_over_L_EST_FREQ_Hz (300)/300高速电动机的默认值,如果电动机ID的RoverL小于2000,则可减少到100
#define user_voltage_filter_pole_Hz (561.92)
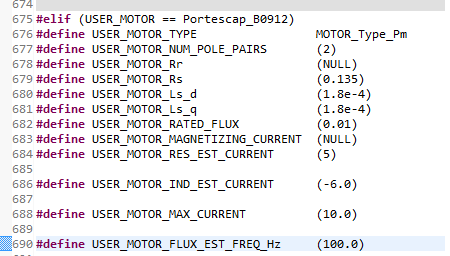
这是我的马达参数
#define user_motor_type motor_Type_pm // motor_Type_pm (所有同步:BLDC,PMSM,SMPM,IPM)或Motor_Type_感 应(异步ACI)
#define user_motor_NUM_pole_pairs (2)//对,而非总极。 仅用于根据转子Hz计算用户RPM
#define user_motor_RR (NULL)//仅感应电机,否则为空
#define user_motor_Rs (0.47.3498万)//在Y等效电路中识别到中性相位(欧姆,浮子)
#define user_motor_ls_d (32.0e-6)//对于感应,确定的定子平均电感(亨利,浮子)
#define user_motor_ls_q (32.0e-6)//对于感应,确定的定子平均电感(亨利,浮子)
#define user_motor_ested_fluate (0.008)// 0.0045 estimated from Back-EMF
#define user_motor_magniting_current (NULL)//识别的感应电机的磁化电流,否则为NULL
#define user_motor_RES_EST_current (1.5)//电机ID期间,用于Rs估计的最大电流(安培,浮子),10 20 % 额定电流
#define user_motor_IND_EST_current (-motor) 1.5 //电机ID期间,最大电流(负电流,浮子)
#define user_motor_MAX_current (3.0)// critical:在ID和运行时使用,设置控制器最大电流命令输出的限制
#define user_motor_fluer_EST_FREQ_Hz (200.0)//电机ID期间,最大指令速度(Hz,浮子)。 应始终使用5 Hz进行感应。
#define user_motor_FREQ_low (166)// Hz -建议设置为额定电动机频率的10 %
#define user_motor_FREQ_high (1667)// Hz -建议设置为额定电动机频率的100 %
#define user_motor_FREQ_MAX (2000)// Hz -建议设置为额定电动机频率的120 %
#define user_motor_volt_min (1.80)// Volt -建议设置为额定电机电压的15 %
#define user_motor_volt_MAX (12.0)// Volt -建议设置为额定电机电压的100 %
如果您对这些错误的故障排除有任何建议,请告诉我。 在过去一周里,我尝试了许多不同的组合,但尚未取得任何成功。
此致,
Chris