请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8335万 主题:controlSUITE中讨论的其他部件
您好,
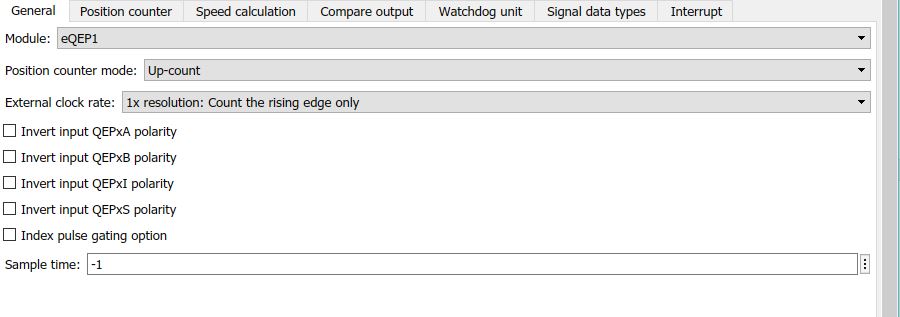
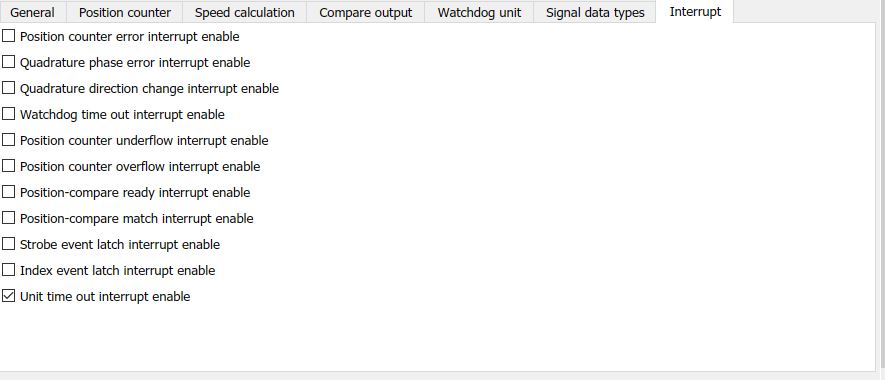
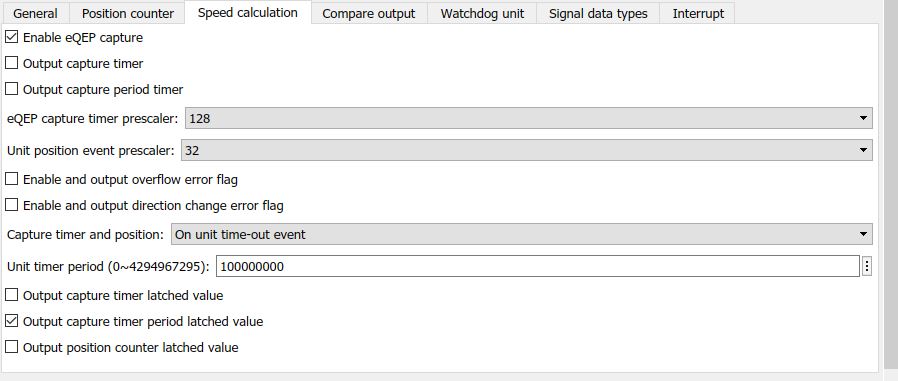
我需要使用eQEP [Simulink]从编码器计算速度。 我已经读 过eQep_sprug05a,但我不能说我明白到底该做什么。 我有一个2000 [额定转速]马达和 一个增量转速计,每转可产生1024个脉冲。 我尝试配置eQEP,但所有寄存器都是零[CCSv6, Real Time ]。
如何计算速度;它是否只能与QEPa脉冲配合使用,还是我也需要QEPindex;
在数据表中,有一种不同的低速和高速方法。 是2000 RMP高速,所以我需要使用两种方法;
controlSUITE中有'example_posspeed.xls'。 我是否可以使用此示例来计算寄存器的值;
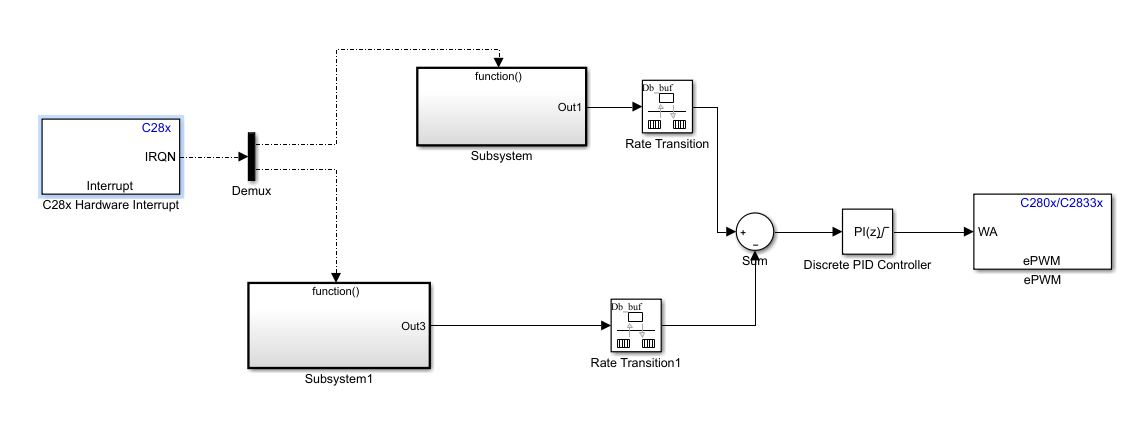
我是否可以使用PWM模块代替编码器脉冲?