主题中讨论的其他部件:CSD9.7396万Q4M
工具/软件:Code Composer Studio
你(们)好
问题1:
程序 正在运行,我 可以看到GPIO32 每 隔1个Us更改级别。
但是
EPwm2Regs.ETSEL.bit.SOCASEL = 4;//在显示计数时从CPMA中选择SOC
| // 在计时器递增时启用等于CMPA的事件时基计数器 |
EPwm2Regs.TBPRD =75;//为ePWM2设置期间
GPIO32 改变 每 位0.5 Us的级别的结果是否正确?
#include "DSP28x_Project.h"//设备头文件和示例包括文件
包含"math.h"
typedef结构
{
易失性结构ePWM_regs *EPwmRegHandle;
} ePWM_INFO;
#define ADC_USDELAY 5000L
void InitEPwm1示例(void);
void gPIO_SELECT (void);
void update_compare(ePWM_info*);
void InitEPwm1Gpio(void);
中断无效ADC_ISR(void);
ePWM_INFO epwm1_info;
#define CPU_FRQ_150MHz 1.
浮点KP=30;
浮子套件=25;
UINT16 EPwmMaxCMPA;
UINT16环计数;
UINT16转换计数;
浮点电流0[10];
float current_mathet[10];
浮点max_current;
浮子u[2];
浮点e[2];
浮动u_change;
浮子N=10;
Void主(void)
{
UINT16 I;
InitSysCtrl();
gPIO_SELECT();
EALLOW;
//默认值- 150 MHz SYSCLKOUT
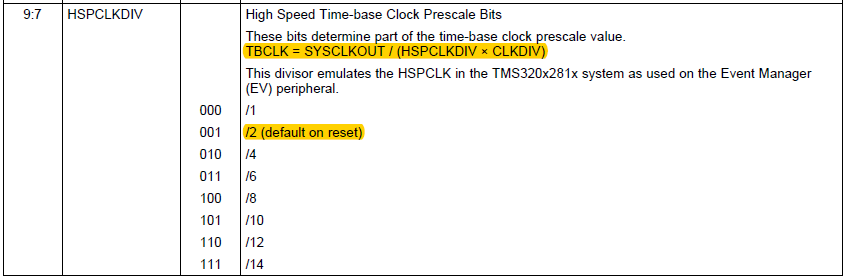
#define ADC_MODCLK 0x3 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 150/(2*3)= 25.0 MHz
EDIS;
EALLOW;
SysCtrlRegs.HISPPCP.ALL = ADC_MODCLK;
EDIS;
Initepwm1gpio();
色调;
InitPieCtrl();
//禁用CPU中断并清除所有CPU中断标志:
IER = 0x0000;
IFR = 0x0000;
InitPieVectorTable();
EALLOW;//这是写入EALLOW保护寄存器所必需的
PieVectorTable.ADCINT =&ADC_ISR;
EDIS;//这是禁用写入EALLOW保护寄存器所必需的
InitAdc();
PieCtrlRegs.PIEIER1.bit.INTx6=1;
IER || M_INT1;//启用CPU中断1
EINT;//启用全局中断INTM
ERTM;//启用全局实时中断DBGM
LoopCount = 0;
ConversionCount = 0;
e[0]=0;
e[1]=0;
u[0]=0;
U[1]=0;
最大电流=0;
GpioDataRegs.GPBSET.ALL =0x0万;
GpioDataRegs.GPBCLEAR.ALL =0x0.0001万;
用于(i=0;i<N;i++)
{
当前0[i]=0;
}
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwm1Example();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
//配置ADC
AdcRegs.ADCMAXCONV.ALL = 0x0000;//在SEQ1上设置2个conv
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0;//将ADCINA0设置为第一个SEQ1转换
AdcRegs.ADCTRL2.bit.ePWM_SOCA_SEQ1 = 1;//从ePWM启用SOCA以启动SEQ1
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1;//启用SEQ1中断(每个EOS)
//假定ePWM2时钟已在InitSysCtrl()中启用;
EPwm2Regs.ETSEL.bit.SOCAEN = 1;//在组上启用SOC
EPwm2Regs.ETSEL.bit.SOCASEL = 4;//在显示计数时从CPMA中选择SOC
EPwm2Regs.ETPS.bit.SOCAPRD = 1;//在第一个事件上生成脉冲
EPwm2Regs.CMPA.Halt.CMPA = 30;// set比较一个值
EPwm2Regs.TBPRD =75;//为ePWM2设置期间
EPwm2Regs.TBCTL.bit.CTRMODE =0;//开始计数
//步骤6。 空闲循环。 只需坐下来永远循环(可选):
对于(;;)
{
ASM (" NOP");
}
}
中断无效ADC_ISR(void)
{
current0[ConversionCount]= AdcRegs.ADCRESULT0 >>4;
GpioDataRegs.GPBTOGLE.ALL =0x0.0001万;
IF (ConversionCount == N-1)
{
ConversionCount = 0;
LoopCount++;
}
Else ConversionCount++;
IF (LoopCount==4)
{update_compare (&epwm1_info);}
//为下一个ADC序列重新初始化
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1;//重置SEQ1
AdcRegs.ADCST.Bit.INT_SEQ1_CLR = 1;//清除INT SEQ1位
PIECtrlRegs.PIEACK/ALL = PIEACK_Group1;//确认中断到PIE
}
void InitEPwm1example()
{
//设置TBCLK
EPwm1Regs.TBPRD =750;
EPwm1Regs.TBPHS.Half.TBPHS = 0x0000;//相位为0
EPwm1Regs.TBCTR = 0x0000;//清除计数器
//设置比较值
EPwm1Regs.CMPA.Halp.CMPA =40;
EPwm1Regs.CMBB =710;
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UDOWN;//对称
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLED;//禁用相加载
EPwm1Regs.TBCTL.bit.PRDLD = TB_shadow;
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;// TBCLK = SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
//设置阴影
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHAME;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADO;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.CAU = AQ_SET;
EPwm1Regs.AQCTLA.bit.CBD = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CAD = AQ_SET;
epwm1_info.epwmRegHandle =&EPwm1Regs;//将指针设置到ePWM模块
}
void update_compare (ePWM_INFO *ePWM_INFO)
{
int i;
最大电流=0;
用于(i=0;i<N;i++)
{ current_mathety[I]=(current0[I]-2274)/4096*3/ACL;<xmt-block0>4096 0.2 // 采样电阻为0.01Ω,Ω,放大20次,将其更改为 电流。
max_current=max_current+fabs (current_mathet[i]);
}
max_current=max_current/N; 1.1107 // 计算 平均值 并将其更改为有效值
e[1]=1-max_current; // 使用PI算法, 但 电流的振幅为1 A 。为什么? max_current是有效值。
u_change=kP*(e[1]-e[0])+Kit*e[1];
u[1]=u[0]+u_change/180*750;
如果(u[1]>738){ u[1]=738;}
如果(u[1]<12){ u[1]=12;}
EPwmMaxCMPA=u[1]/2;
ePWM_INFO_>EPwmRegHandle->CMPA.Half.CMPA=EPwmMaxCMPA;
ePWM_INFO_>EPwmRegHandle->CMPB=750-EPwmMaxCMPA;
u[0]=u[1];
e[0]=e[1];
最大电流=0;
LoopCount=0;
//返回;
}
void gPIO_SELECT (void)
{
EALLOW;
gpioCtrlRegs.GPBMUX1.ALL = 0x0万000000;0万;//所有GPIO
gpioCtrlRegs.GPBMUX2.all = 0x0万;//所有GPIO
GpioCtrlRegs.GPBDIR.ALL = 0x0万F;//所有输出
EDIS;
}