请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8312-69M-Kit
您好,
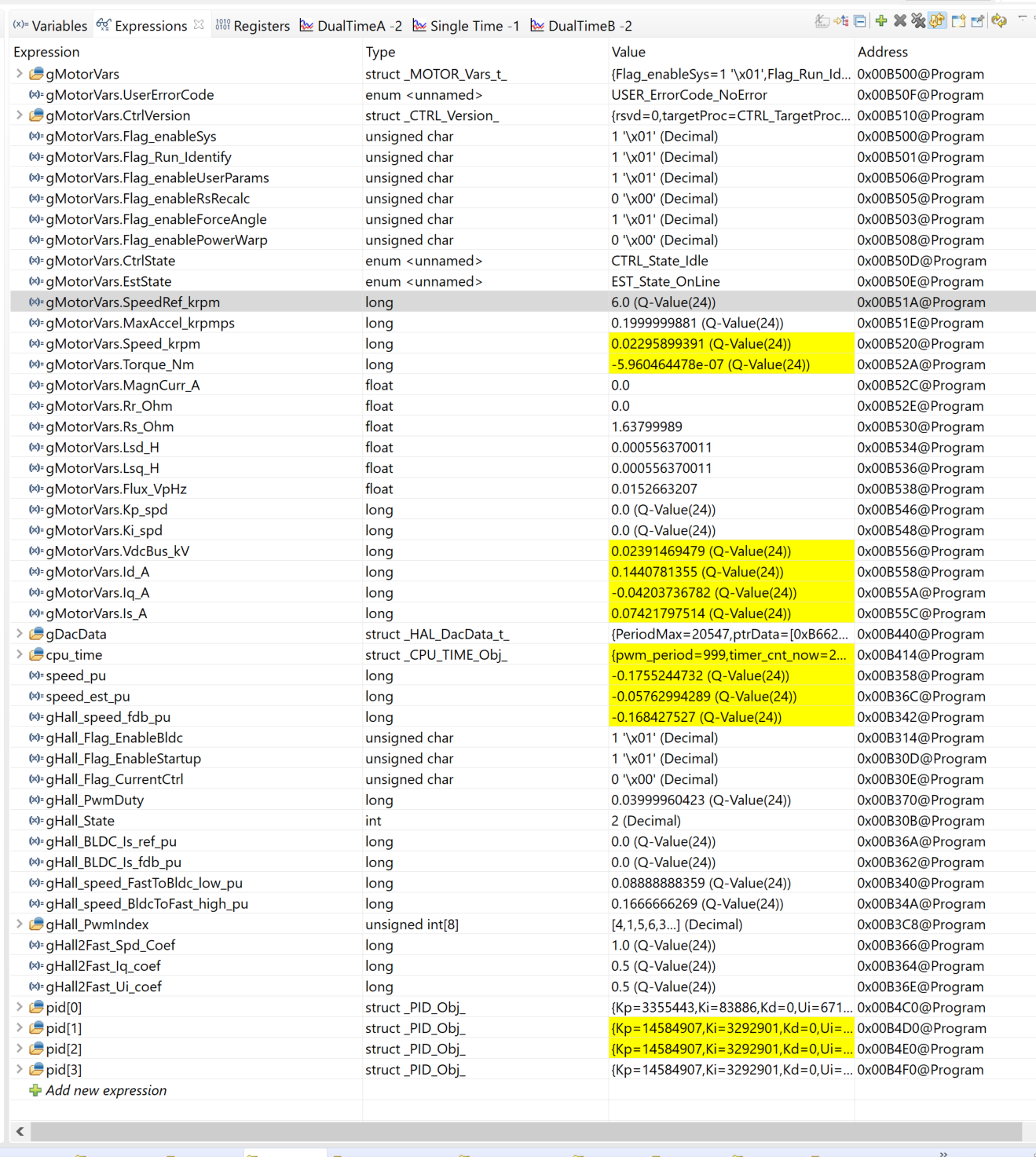
我正在使用一个Maxon 33.9267万感应电机和DRV8312-69M-Kit使用InstaSPIN LAB 11e。 我可以低速旋转电机,但即使在低速时也无法使用gMotorVars.SpeedRef_Krpm更改速度。 此外,报告的速度(gMotorVars.Speed_Krpm )也显示无效。 我认为我的换向表不正确? 我尝试计算换向表,但没有取得很多进展。 下面是三个霍尔传感器波形(黄色H1,蓝色H2和粉色H3)和电机绕组A (绿色)的范围捕获。

唯一有效的换向是实验室提供的换向{4,1,5,6,3, 2,4,1}。 我们非常感谢您的帮助!